16
Python API:
Function: led_ctrl.turn_off(armor_enum)
Parameters:
● armor_enum(enum)
■ rm_define.armor_all
■ rm_define.armor_bottom_front
■ rm_define.armor_bottom_back
■ rm_define.armor_bottom_left
■ rm_define.armor_bottom_right
■ rm_define.armor_top_left
■ rm_define.armor_top_right
Chassis
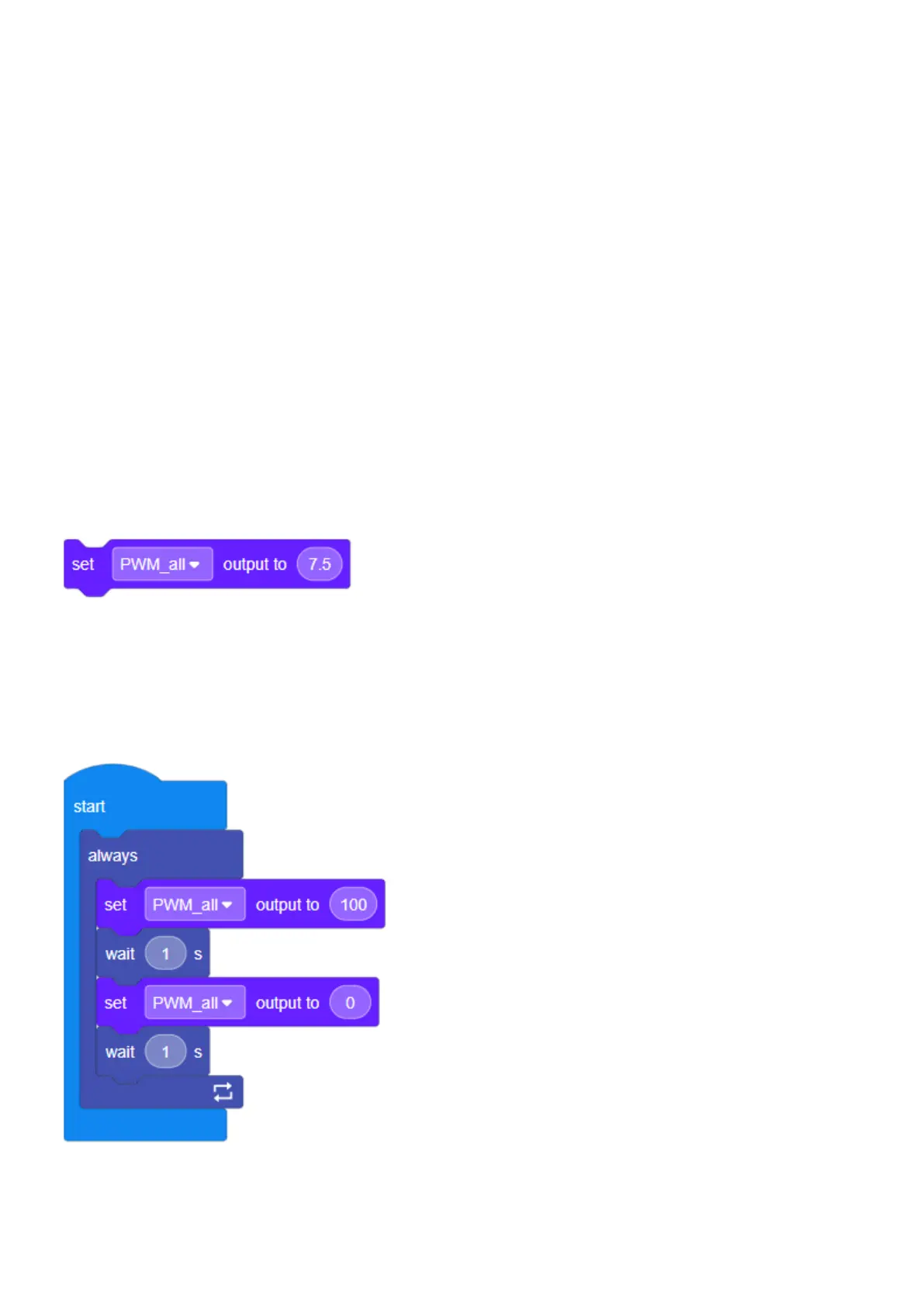
1. Set (PWM_all) output to (7.5)
(1) Description: Set the output percentage for the PWM port; the larger the value used, the longer the port will maintain a
high level of output over the specified time period. The basic frequency for the PWM port is 50Hz.
(2) Type: Settings block
(3) Examples: Turn LED on/off, rotate navigation gear
① Turn LED on/off
This enables you to connect an LED to any PWM port and then turn the LED on or off.