17
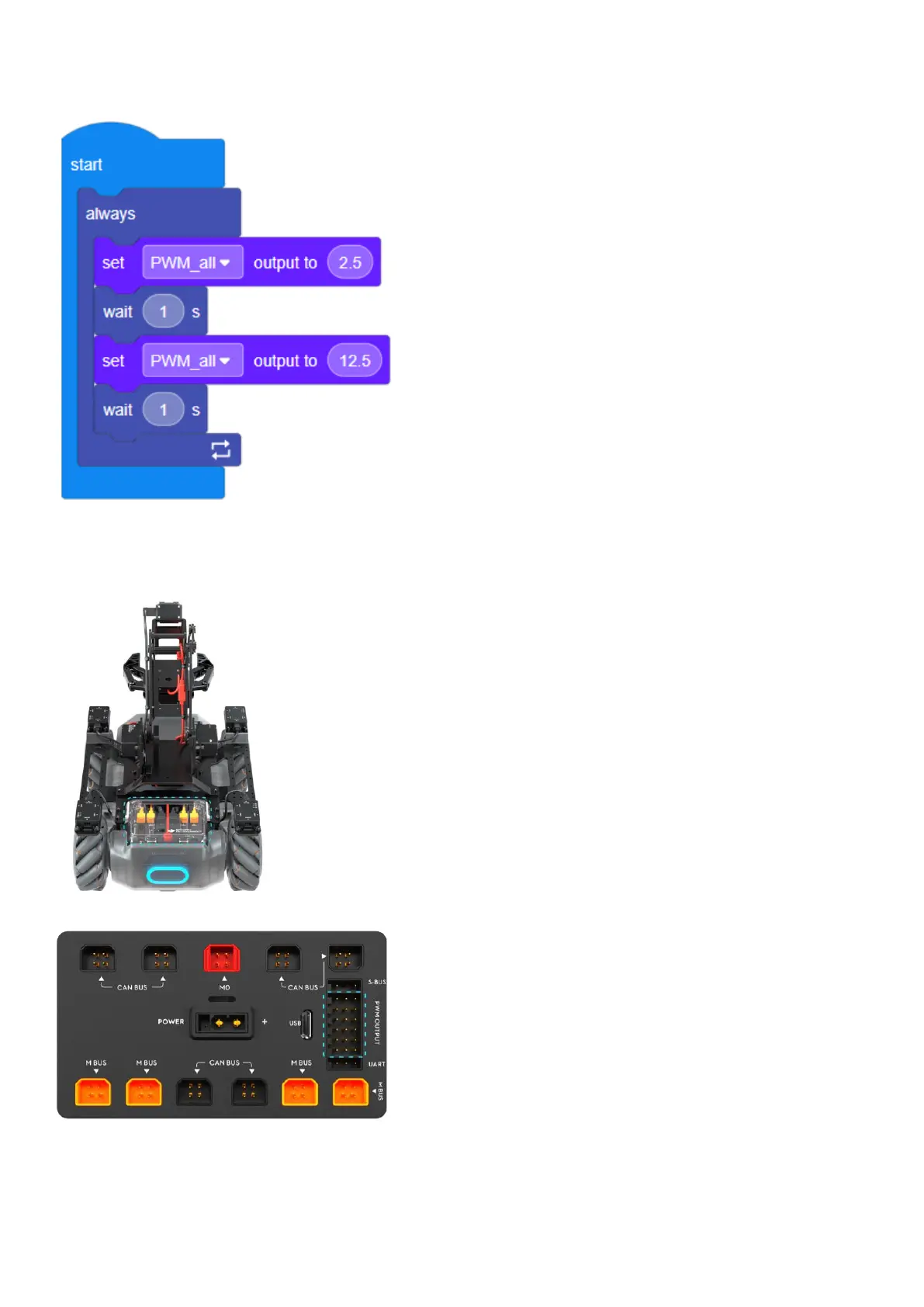
② Rotate navigation gear
This enables you to connect an external navigation gear to any PWM port and then control its rotation.
Notes:
1) PWM port is located on the chassis motion control module and can be seen by removing the transparent cover on the
rear side of the chassis.
There are six PWM ports in total.
2) PWM (pulse width modulation) controls the duration of a high level of output during a certain period, and is broadly
used to control LEDs, navigation gears, and more.
3) When the robot is powered on, PWM port outputs a signal of 7.5% PWM for default. When every program is running
to the end, the output signal will return to its default setting.