18
4) For LEDs, the PWM output rate ranges from 0% to 100%, with 0% corresponding to an LED’s lowest brightness and
100% to its highest brightness.
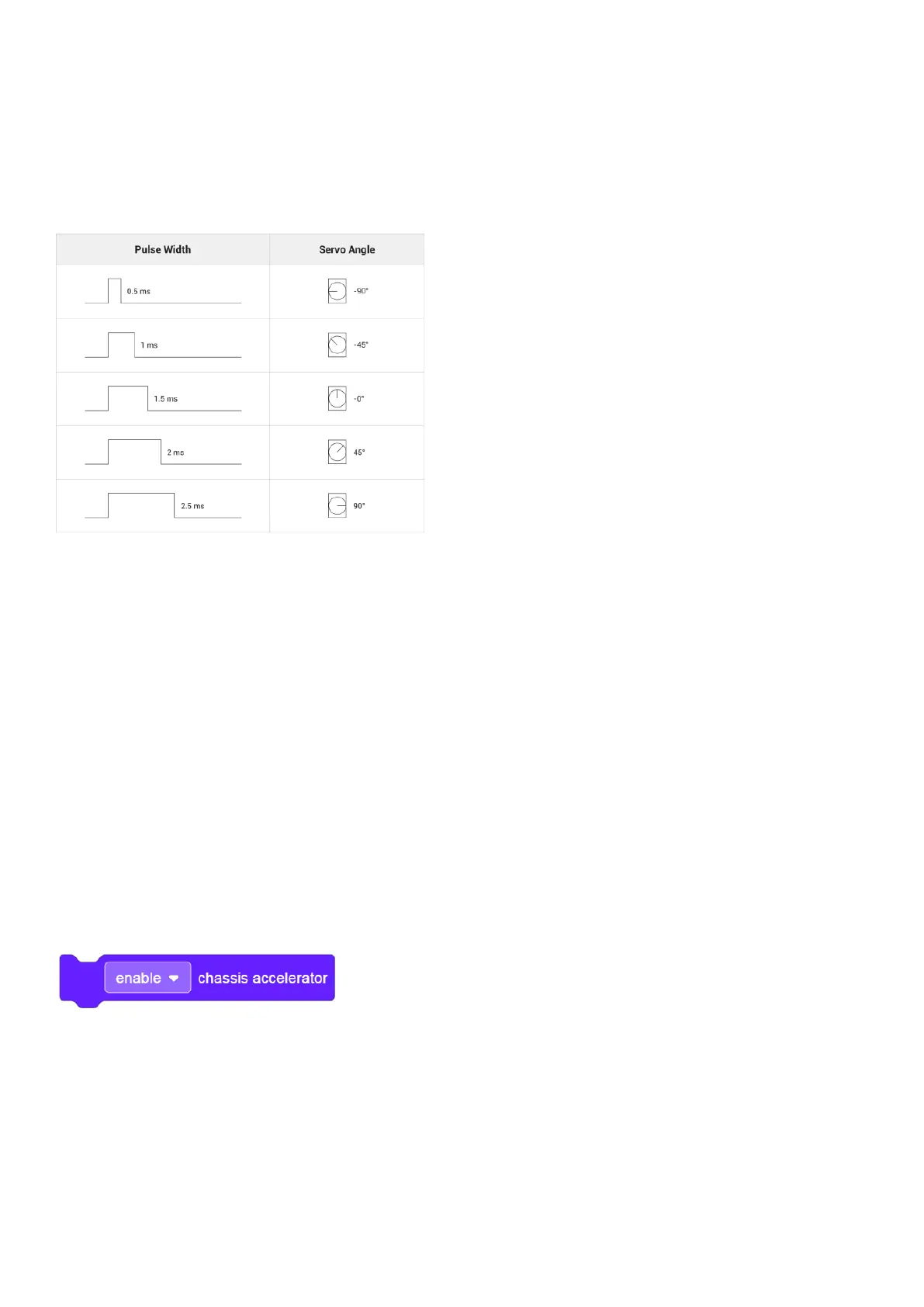
5) For navigation gears, the PWM output rate ranges from 2.5% to 12.5%. Because most navigation gears have a control
impulse frequency of 50Hz and a control period of 20ms, and because the high-level pulse width of outputs with an
adjustable angle range of -90° to 90° ranges from 0.5ms to 2.5ms, control of the navigation gear’s duty ratio ranges from
0.5/20 to 2.5/20, which is to say from 2.5% to 12.5%.
You can set the navigation gear PWM output percentage based on the rotation angles you wish to control.
Python API:
Function: chassis_ctrl.set_pwm_value(pwm_port_enum, output_percent)
Parameters:
● pwm_port_enum(enum)
■ rm_define.pwm_all
■ rm_define.pwm1
■ rm_define.pwm2
■ rm_define.pwm3
■ rm_define.pwm4
■ rm_define.pwm5
■ rm_define.pwm6
● output_percent(int): [0, 100]
2. (Enable) chassis accelerator
(1) Description: Enable/disable the chassis accelerator
(2) Type: Settings block
(3) Example: Operate chassis accelerator