19
When the chassis is moving automatically, this will enable you to use the joystick to manually rotate or translate the chassis and
increase its translation speed.
Notes:
1) If the “Enable chassis accelerator” block has not been added, you will not be able to manually control the chassis while
running the program. After adding this block, you will be able to manually control and accelerate the robot’s
movements.
2) Joystick sensitivity refers to the push range of the joystick; the joystick’s sensitivity ranges from -1 to 1.
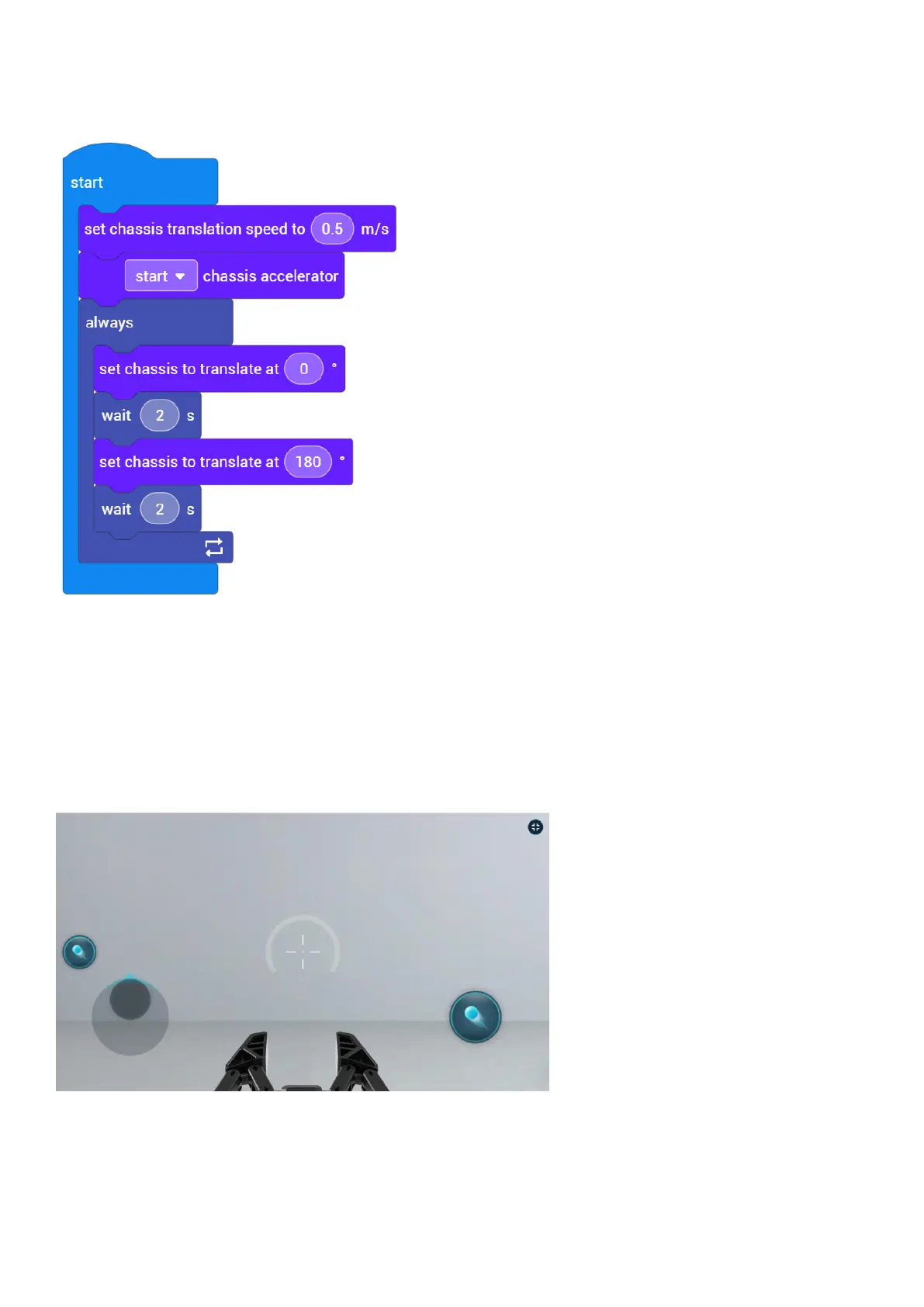
In the image below, the virtual joystick shown on the FPV interface has reached its upper limit, meaning its sensitivity value
is 1.
3) When the chassis accelerator is enabled, the programmed speed will be added to the current speed.