37
■ rm_define.chassis_forward
■ rm_define.chassis_translation
■ rm_define.chassis_rotate
Return value:
● position(float)
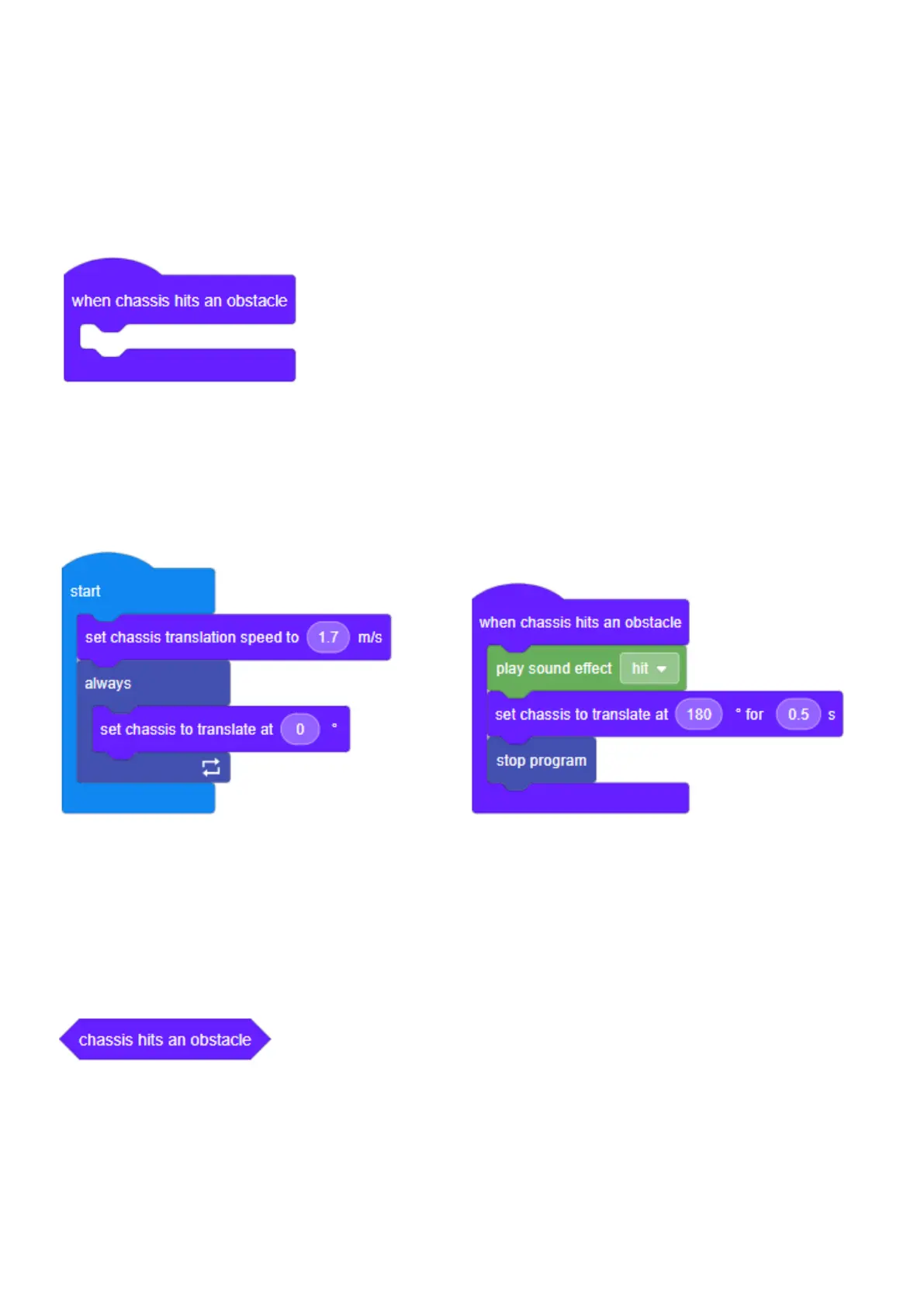
19. When chassis hits an obstacle
(1) Description: Run the program for the corresponding block when the chassis hits an obstacle (people, table legs etc.)
while driving
(2) Type: Event block
(3) Example: Self-defend
This enables the self-defense mechanism to activate when the chassis impacts an obstacle, causing the robot to retreat and
stop running the block.
Python API:
Function: def chassis_impact_detection(msg)
Type: Event callback
20. Chassis hits an obstacle
(1) Description: Return “True” when the chassis hits an obstacle (people, table legs etc.) while driving; otherwise, returns
“False”