42
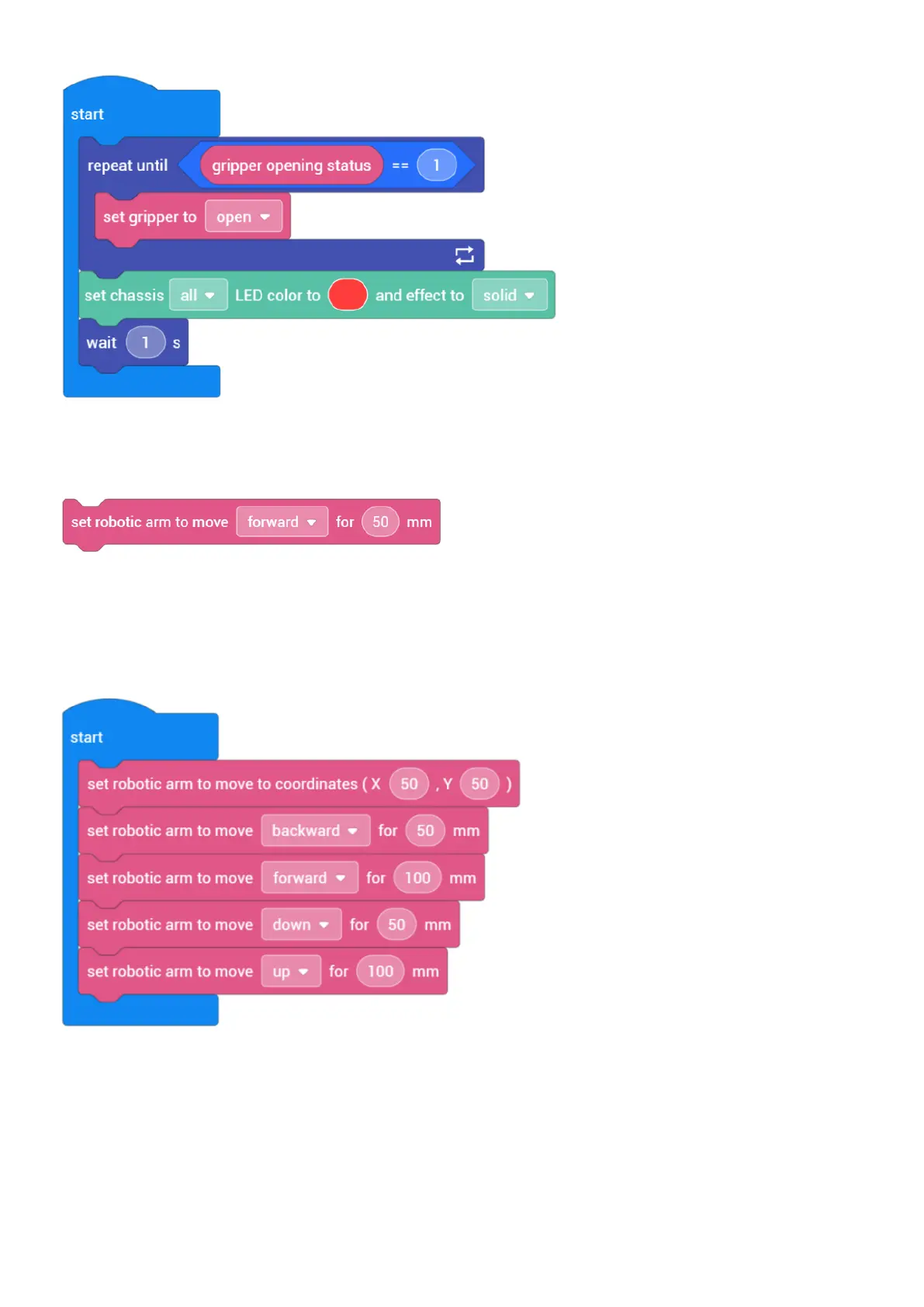
5. Set robotic arm to move forward for (50) millimeters
(1) Description: Using the robot body coordinate system as the reference frame, and control the robotic arm to move in a
specified direction for a set distance.
(2) Type: Execution block
(3) Example: Robotic arm dance
Control the robotic arm to move forward, backward, upward, and downward.
Notes:
1) The robotic arm of this robot is a parallel robotic arm. It has a more complex structure which comes with a high load-bearing
capacity, rigidity, and precision. It is driven by two servos installed at the bottom of the robotic arm.
2) The end executor of the robotic arm is the gripper. By controlling the connecting rod of the robotic arm, the gripper moves
forward and backward along the direction the robot’s heading, and upward and downward vertically along the robot body,
thus flexibly and accurately delivering the gripper to the specified position.
3) Due to the difference in assembly and calibration environment of each robot, the robot coordinate systems of different robots