44
Notes:
1) Mark the origin when connecting the robotic arm and proceed according to the instructions in the manual.
2) Flexibly control the robotic arm, the gripper, and the mobile chassis so that the robot can grasp, lift, transfer, and deliver
objects.
3) Due to the difference in assembly and calibration environment of each robot, the robot coordinate systems of different robots
may differ, and the robot has built-in limit protection in software, please use the slider to manually control the robotic arm to
the target position on the operation interface, use the “robotic arm current position” block to obtain the current robotic arm
coordinate information, and then debug the program.
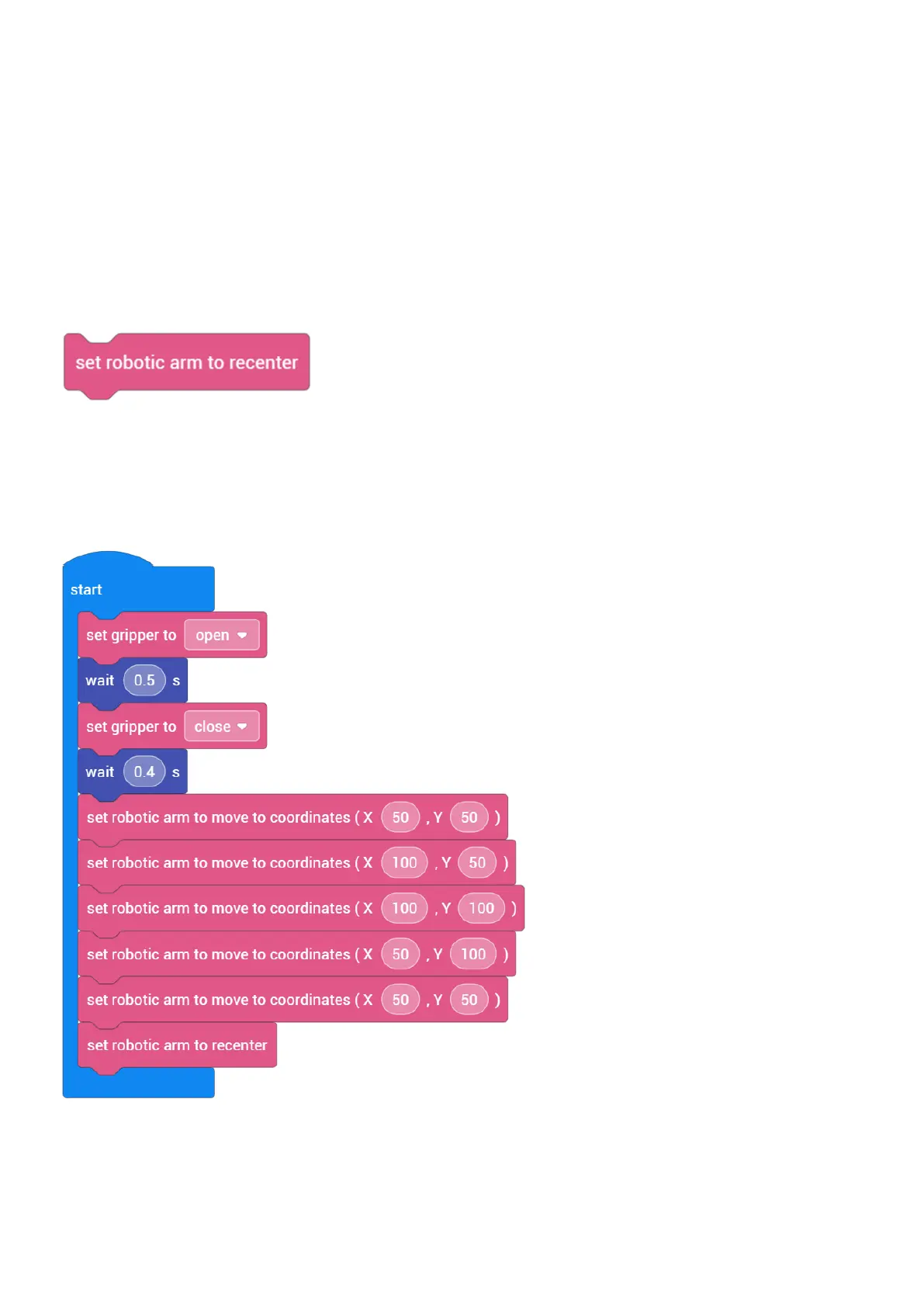
7. Set robotic arm to recenter
(1) Description: Control the robotic arm so that it can return to the original position, which is (0, 0) of the body coordinate
system.
(2) Type: Execution block
(3) Example: Draw a square
Control the gripper to grip a writing brush and draw a square by moving the robotic arm and then recenter.
Note:
Due to the difference in assembly and calibration environment of each robot, the robot coordinate systems of different robots may
differ, and the robot has built-in limit protection in software, please use the slider to manually control the robotic arm to the target