45
position on the operation interface, use the “robotic arm current position” block to obtain the current robotic arm coordinate
information, and then debug the program.
8. Robotic arm current position
(1) Description: Obtain the robotic arm current position. The position parameter is (X (abscissa), Y (ordinate)). The unit is
millimeter.
(2) Type: Execution block
(3) Example: robotic arm current position, set the robotic arm to recenter
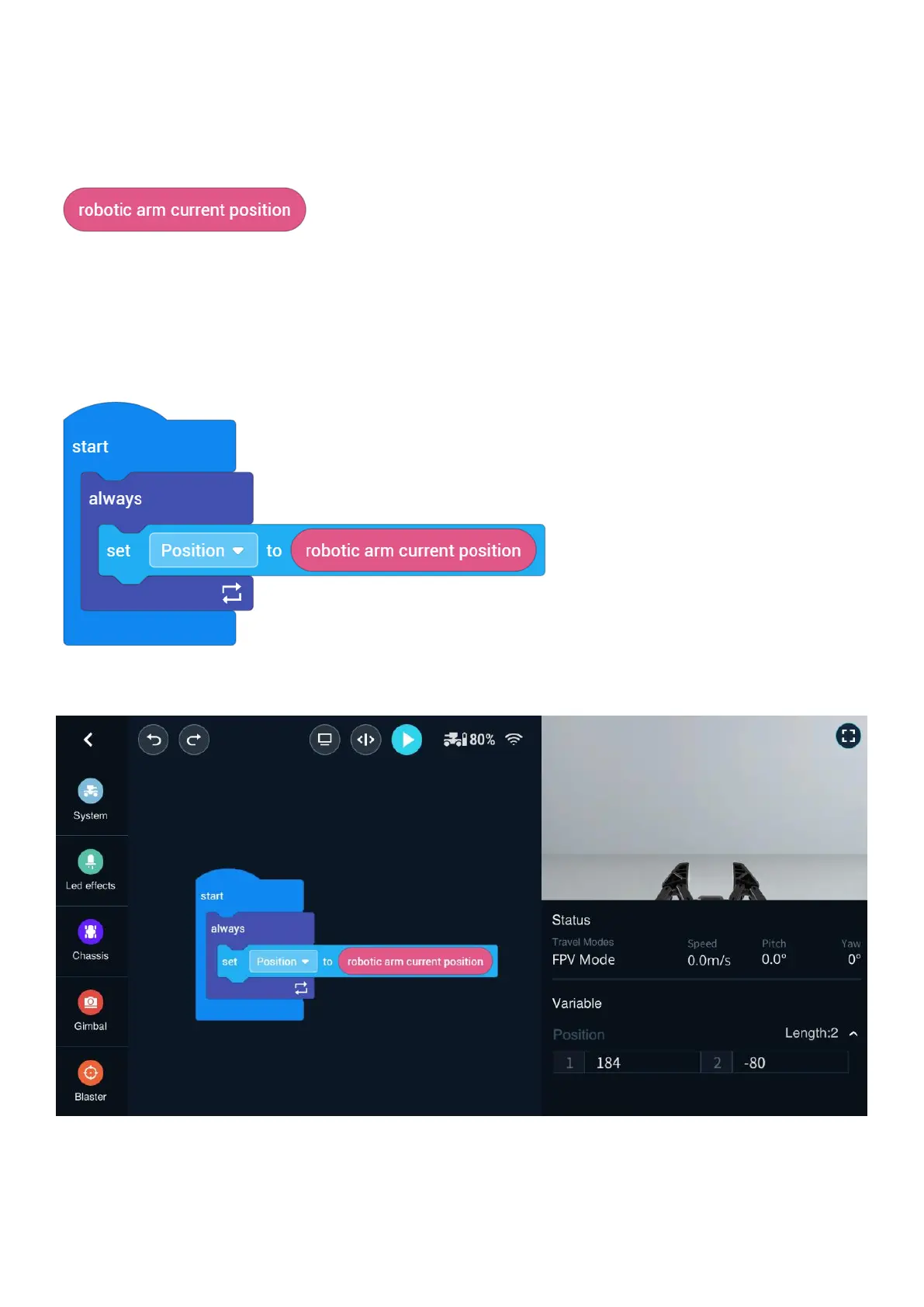
① The current coordinate position of the robotic arm
After moving the robotic arm to the best position for grasping the object, the current coordinate information is obtained.
It can be observed through the FPV window:
② Set robotic arm to recenter
By calculating the difference between the current horizontal and vertical coordinates of the robotic arm and those of the original
position, the robotic arm is controlled to return to the center.