99
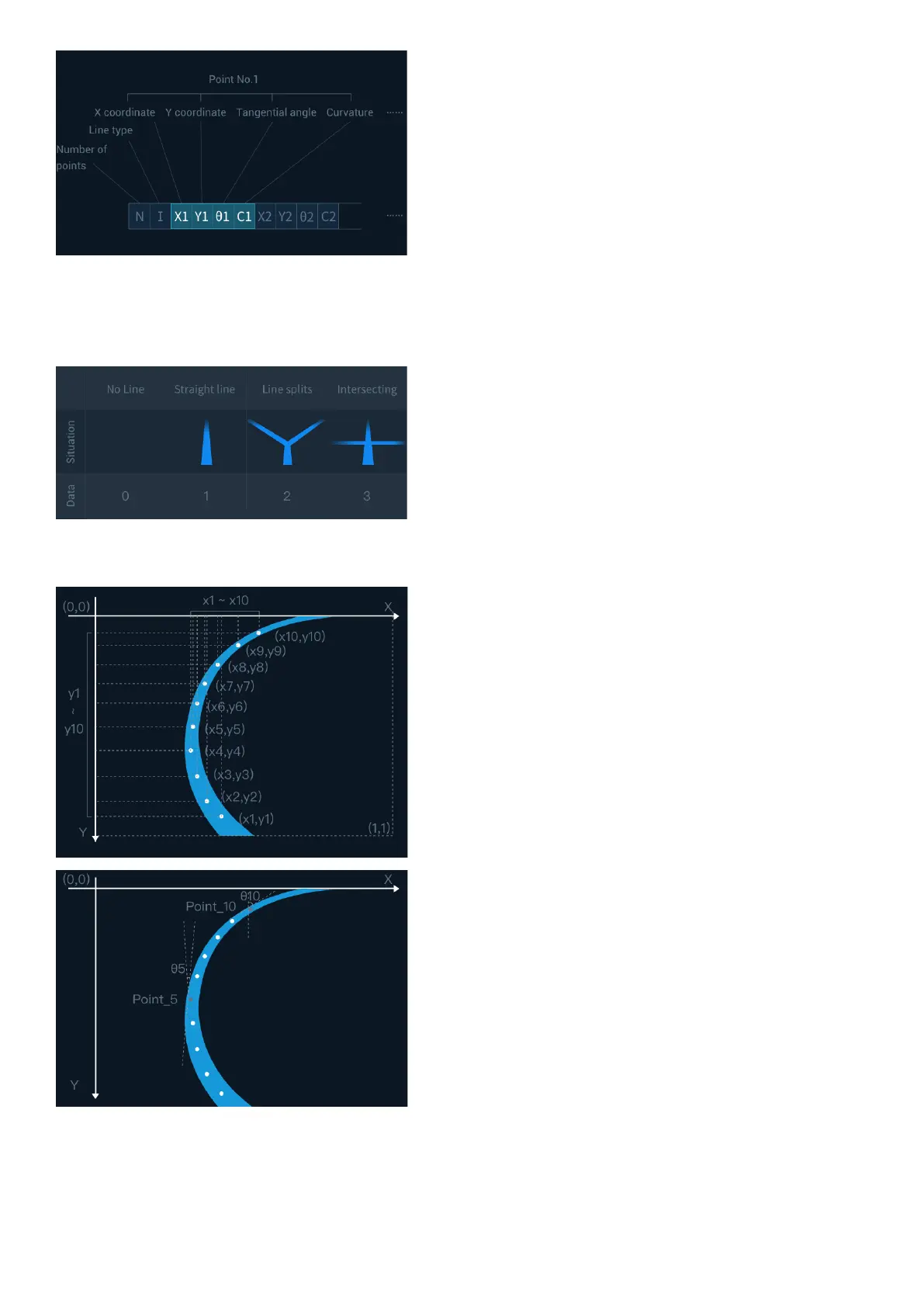
The first data set, N: Number of points The fixed value is 10 or 0 with 10 indicating line detection and 0
indicating the opposite.
The second data set, I: line type 4 cases : "0", indicates no line is identified; "1", indicates one line within the
FOV; "2", indicates a Y intersection; "3", indicates a crossroad.
The third and fourth data sets (X1 and Y1) indicate the coordinate information of the first point on the line.
The first point is at the bottom of the FOV, which is the point closest to the robot.
The fifth data set θ1: Tangent angle of the first point. When the tangent angle is 0, it means that the angle
between the tangent and the vertical direction of this point is 90 degrees; when the tangent angle is 90, it
proves that the line that this point is very curved.