18
■ rm_define.armor_top_all
■ rm_define.armor_top_left
■ rm_define.armor_top_right
● r(int): [0, 255]
● g(int): [0, 255]
● b(int): [0, 255]
● led_effect_enum(enum):
■ rm_define.effect_always_on
■ rm_define.effect_always_off
■ rm_define.effect_breath
■ rm_define.effect_flash
■ rm_define.effect_marquee
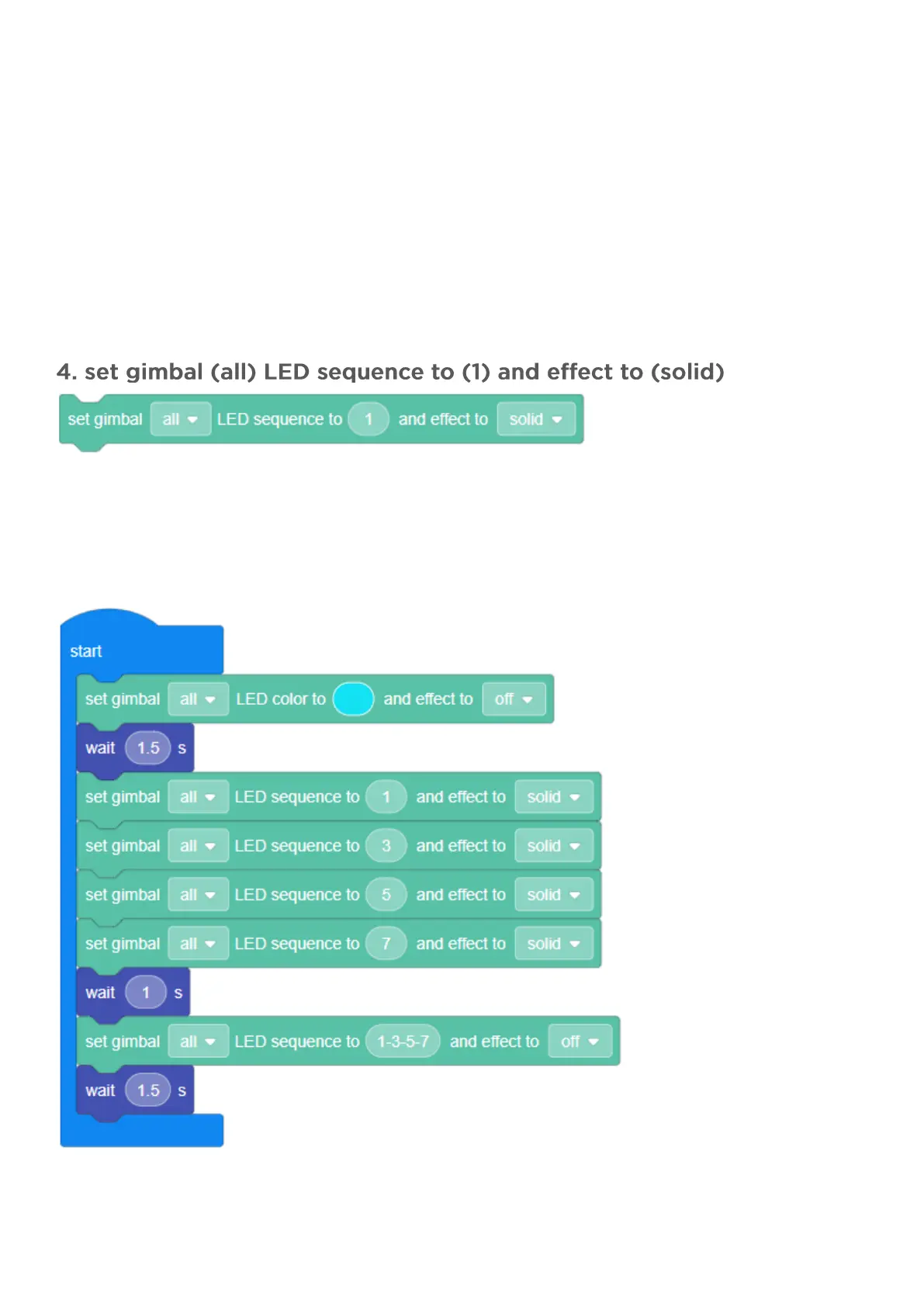
(1) Objective: Sets the flash sequence for the gimbal LEDs; eight LEDs are located on each side of the gimbal
and can be controlled independently
(2) Type: Execution block
(3) Example: Switch on a single light
This will set the robot to switch off all the gimbal LEDs, switch on the odd-numbered LEDs in ascending order,
and then switch off all LEDs.
The figure below shows a counterclockwise LED arrangement.