80
clapping.
Python API:
Function: media_ctrl.enable_sound_recognition(function_enum)
media_ctrl.disable_sound_recognition(function_enum)
Parameters:
● function_enum(enum):
■ rm_define.sound_detection_applause
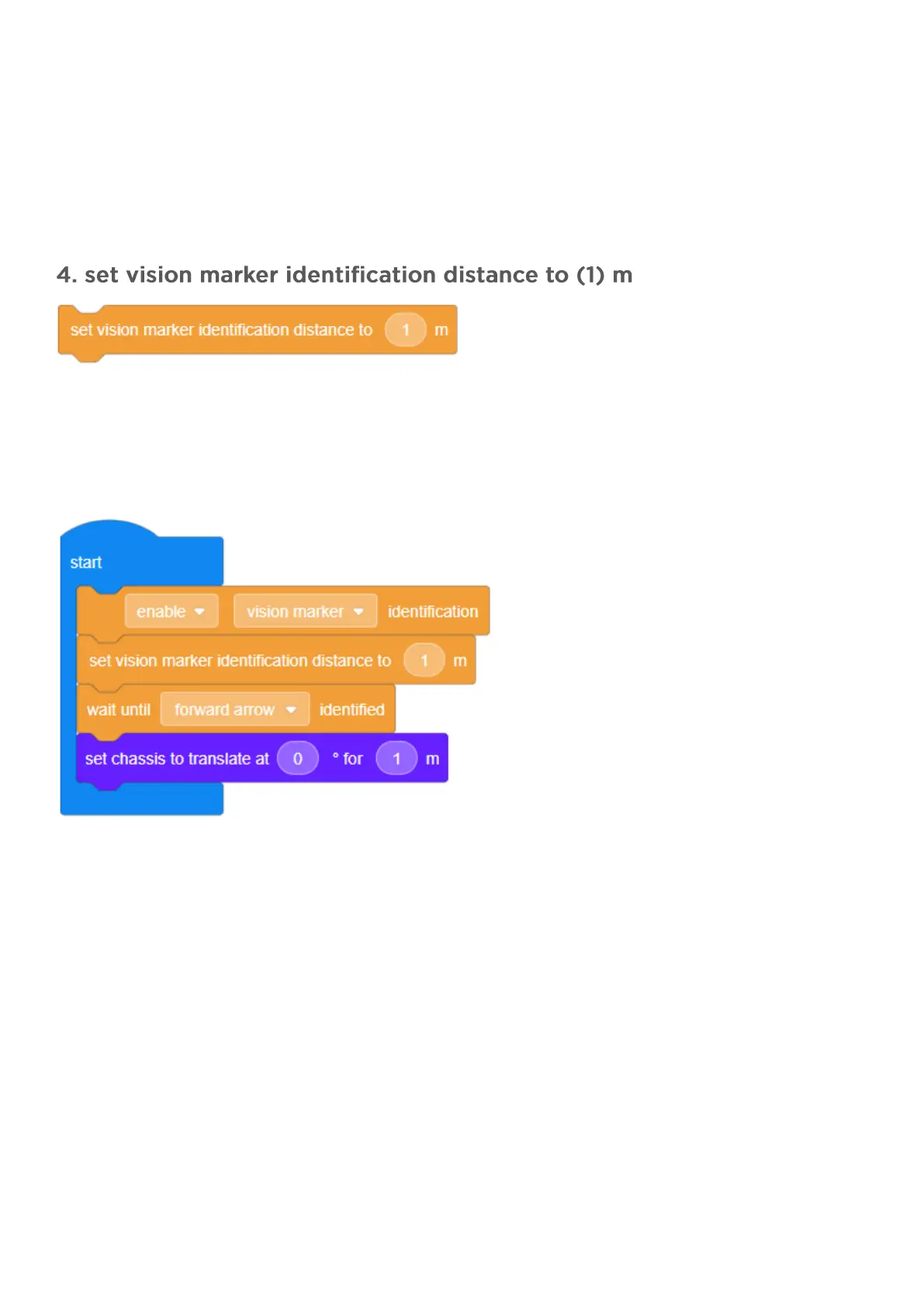
(1) Objective: Sets the maximum Vision Marker identification distance for the gimbal; beyond this distance,
the robot will be unable to recognize Vision Markers.
(2) Type: Settings block
(3) Example: Set identification distance
When the robot identifies a forward arrow it will translate forward by 1 meter.
Note:
1) If the Vision Marker is placed more than 1 meter away from the robot (for example 1.5 or 2 meters away
from the robot), the robot will not be able to identify it.
2) The identification distance only applies when using Vision Markers of the official standard size. The
effective identification distance may vary if you print your own Vision Markers in non-standard sizes.
Python API:
Function: vision_ctrl.set_marker_detection_distance(distance)
Parameters:
● distance(float): [0.5, 3]