COMMISSIONING DYNAVERT L
4Bs0503en/002 Version: 11.10.02 12
• Parameterize v Posi, Stop. dist., Position., v 3 and Brak.dist.3.
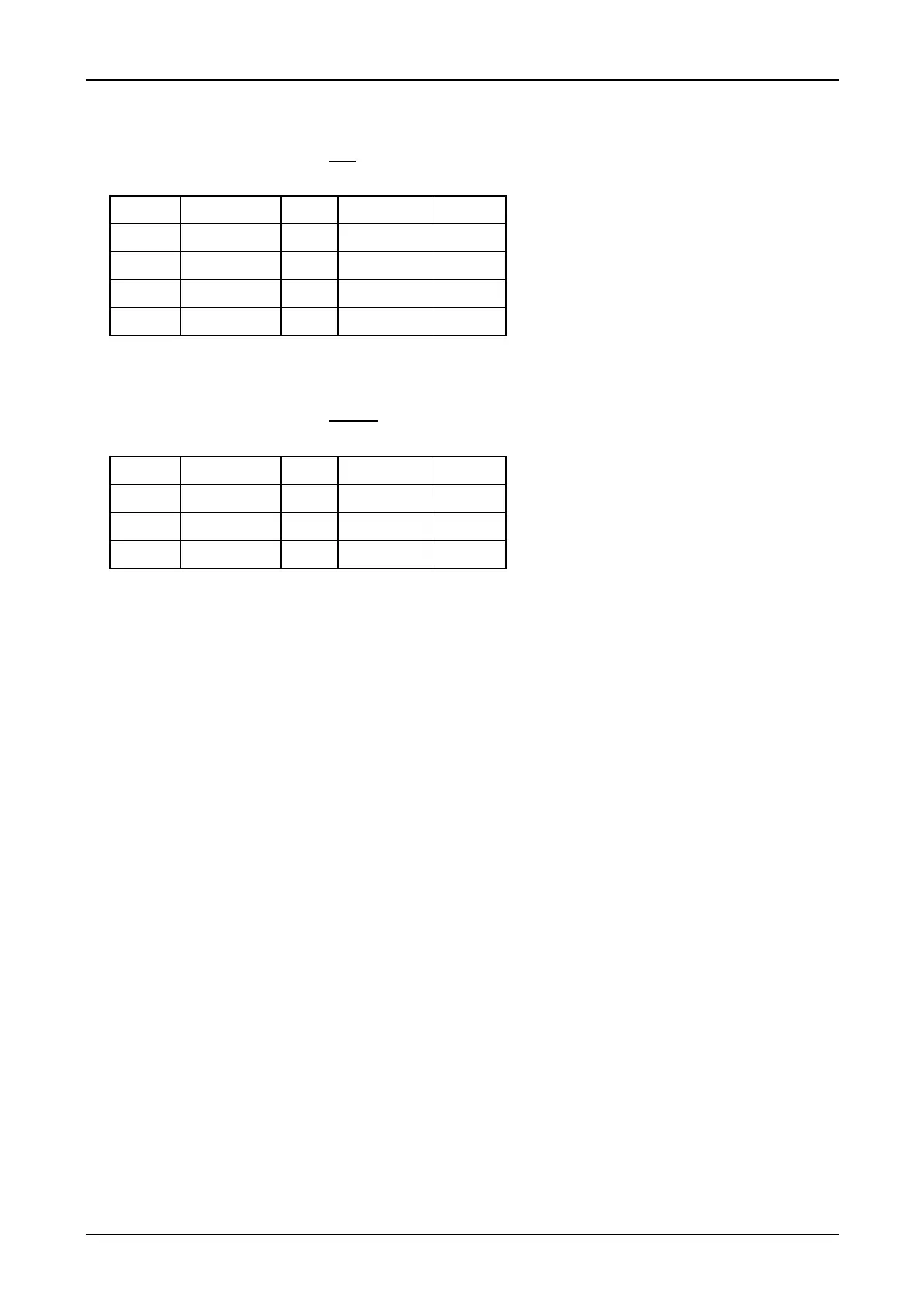
Recommended adjusting values with actual value feedback: for parameterization and shaft tags.
v 3 Brak.dist.3 v Posi Stop. dist. Position
m/s cm m/s cm cm
up to 0.8 higher 125 0.05 8 10
0.8...1.6 125...315 0.1 12 12
1.6... 2.5 315...600 0.15 18 25
Recommended adjusting values without actual value feedback: for parameterization and shaft tags.
v 3 Brak.dist.3 v Posi Stop. dist. Position
m/s cm m/s cm cm
up to 0.8 higher 125 0.08 9 15
0.8...1.2 150 0.1 12 25
2. Menu item P-MONITORING
• parameterize v max
− v max should be 10% higher than the rated speed v 3.
3. Menu item P-SYSTEM DATA
• set v/n (ratio of speed v [m/s] to speed n [min
-1
]).
Calculate v/n value: generally valid calculation formula:
v = 0.05236 x n-motor x D x u x A
v theoretically possible speed of the lift car at the rated speed of the motor
[m/s]
n-motor
rated motor speed according to the type plate [min
-1
]
D
driving disk diameter [m]
u gear reduction (e.g. 2/45)
A suspension (e.g. 1/2)
With actual value feedback
• Enter Pulses/360: Enter pulse number of the pulse generator
Without actual value feedback
• Type of tacho=none
• Engag t br. = 0.1