WinFrog User’s Guide - Appendix C – Magnetometer / GSM-19 Page 3 of 5
The default configuration is GSM-19. To configure for GSM-19MD input, right-click in
the I/O Devices window and choose Configure Device (i.e. the Select GSM Model
dialog does not open automatically when the device is added to WinFrog).
WINFROG VEHICLE > CONFIGURE VEHICLE DEVICES > DEVICE DATA ITEM >
EDIT:
MAGNETOMETER Data Item:
Once the MAGNETOMETER data item has been added to the vehicle device list it must
be edited to suit the application.
This data item must be added to a vehicle for data recording to occur. After the data
item is attached to a vehicle, the type 800 Raw Data Record will be saved (if RAW data
recording is occuring) for post processing options.
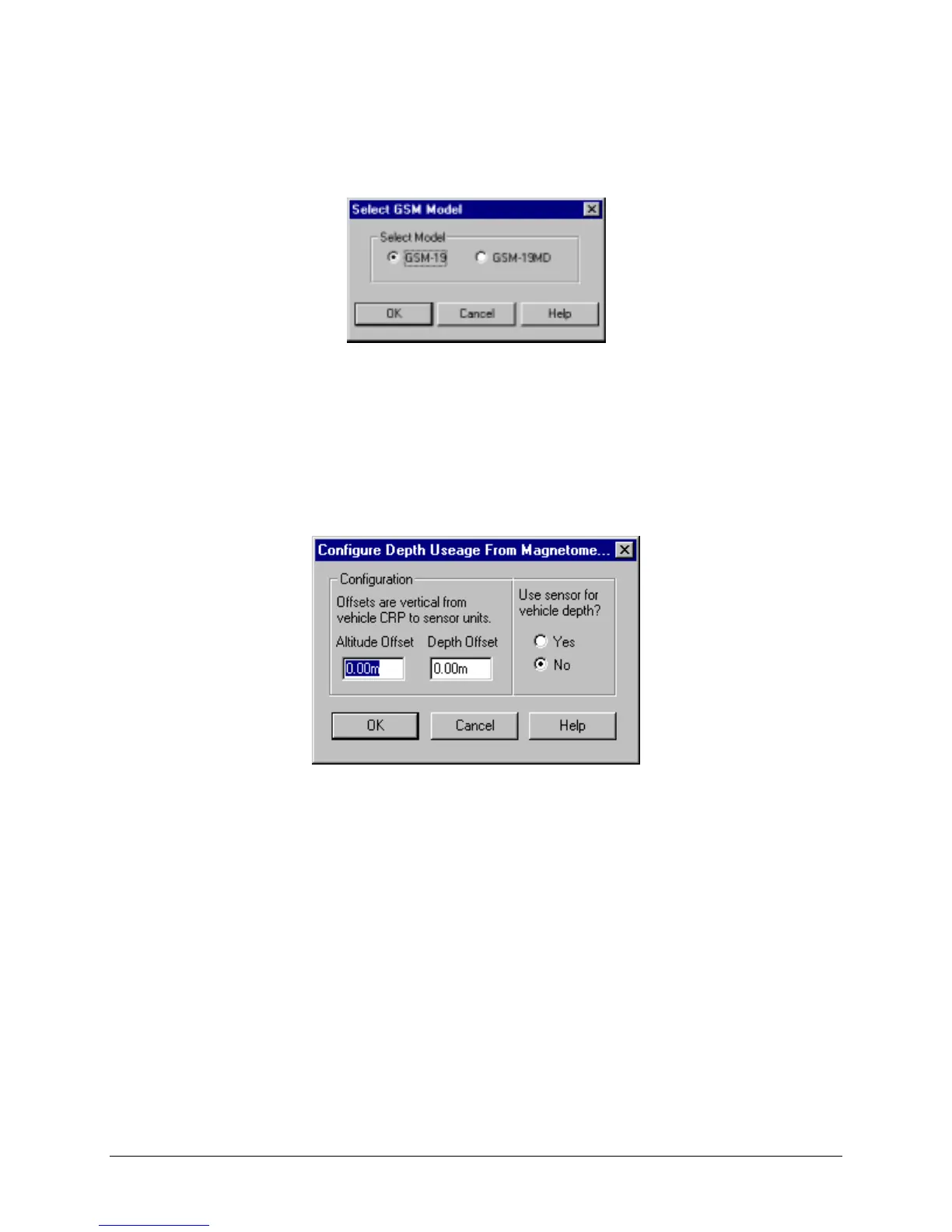
It should be noted that both of the offset options are vertical offsets measured from the
CRP of the vessel to the respective sensors with up being positive.
The “Use for vehicle Depth” option allows you to display the vehicle depth (depth sensor
measured + offset) in the Vehicle Text window by selecting “yes”. If “no” is selected and
no other depth sensor devices are added to this vehicle, the depth will be displayed as
zero in the vehicle text window.
Since the GSM19 does not include depth in its telegram the “Use sensor for vehicle
depth” must be set to ‘No’, otherwise the vehicle depth will always be 0.
The GSM19MD outputs depth but not altitude, so only the depth offset has any effect.
 Loading...
Loading...


