A search pattern 1 or 3 will be initiated according to which GYRO TYPE is selected and
the existence of the gyro input.
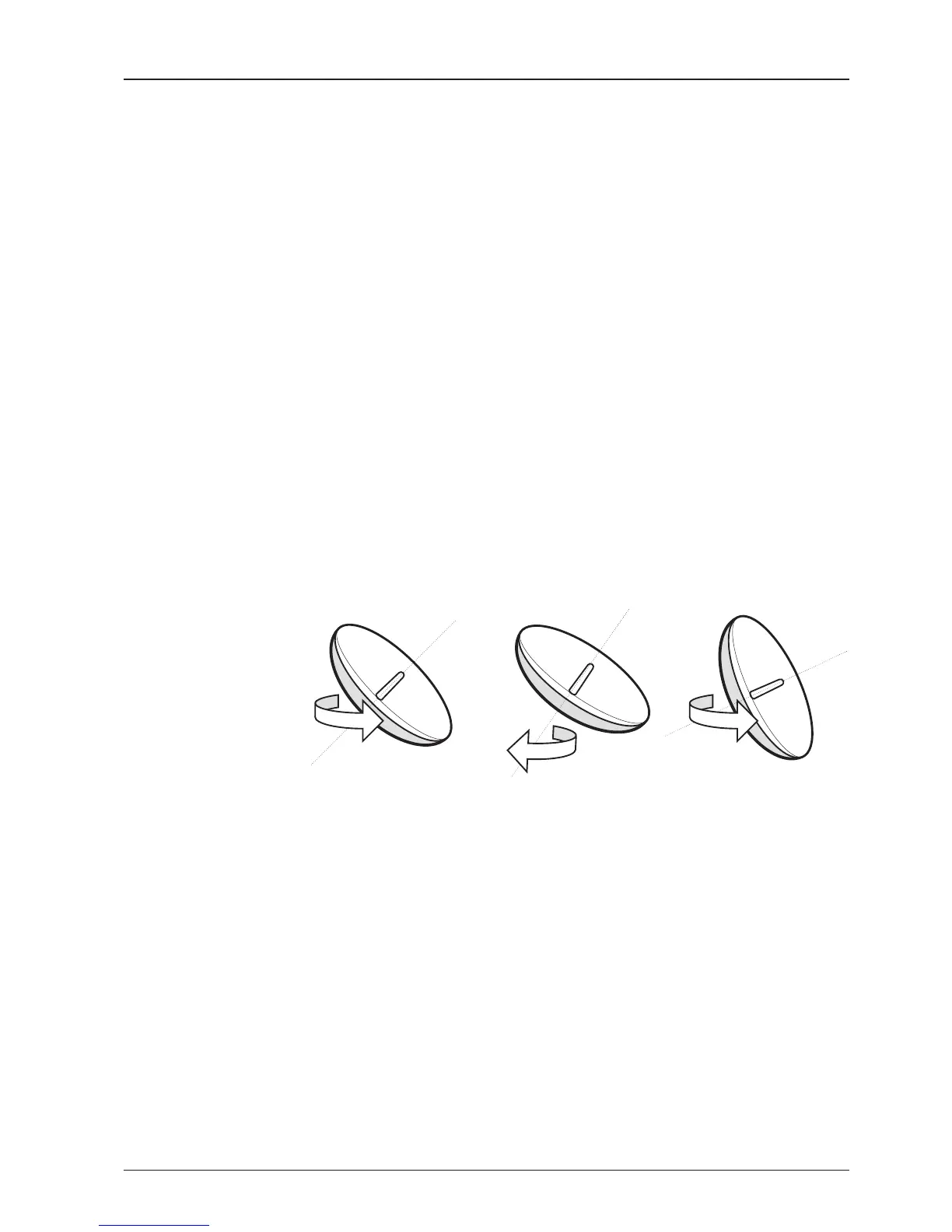
Search 1: a search pattern 1 will automatically be initiated when the ship’s heading
input does not exist / is failed .The antenna will go to the relative azimuth
position 0°at the calculated elevation and search in the azimuth CW and CCW direction
in a turn rotation and search up + 0.5° & down -0.5° with a total 6 (±3°) in elevation. The
search cycle will repeat until the antenna receives the lock signal from the receiver or the
DVB transponder of the target satellite is decoded by the antenna. If the desired signal is
found and above the predened detect level, the ACU will enter to Search 3. However,
the antenna will not initiate Search 3 pattern but go into TRACKING mode immediately if
the desired signal is above the predened tracking threshold level. If the detected signal
is below the predened tracking threshold level, the search 1 will repeat and start 3°
away from the current position.
Search 1 Antenna Motion
Target EL Angle
Turn 1
Target EL Angle + 0.5°
(or dened step size)
Turn 2
Target EL Angle -0.5°
(or dened step size)
Turn 3
 Loading...
Loading...


