6
kolem. K zatočení také nestačí jen pouhé vychýlení směrovky na příslušnou
stranu. Dále také je třeba si uvědomit, že řízení modelu je proporcionální, to
znamená, že úměrně vychýlení ovladače se vychyluje i příslušné kormidlo
nebo přidává či ubírá plyn. Potřebné výchylky pák ovladačů jsou většinou
jen velmi malé, nikoliv doraz-doraz.
Křidélky se ovládá příčný náklon modelu (naklonění křídla). Jemným vy-
chýlením ovladače křidélek např. vlevo dosáhneme naklonění modelu vle-
vo. Pokud bychom ponechali ovladač vychýlený, model bude pokračovat
(rychlostí, která je úměrná velikosti výchylky ovladače) v naklánění - nakonec
může vykonat celý výkrut - otočení modelu okolo podélné osy o 360 stupňů.
Pokud ovladač křidélek po uvedení modelu do požadovaného náklonu vrá-
tíme do neutrálu, model dále poletí v tomto náklonu.
Výškovým kormidlem (výškovkou) ovládáte model ve svislé rovině; jemným
přitažením ovladače výškovky k sobě dosáhnete stoupání modelu, naopak jem-
ným potlačením ovladače od sebe klesání. Model ovšem není schopen trvale
stoupat jenom v důsledku vychýlení výškovky, potřebuje k tomu energii dodá-
vanou motorem. Pokud tedy chcete stoupat, musíte přidat plyn - v opačném pří-
padě model začne ztrácet rychlost a pokud byste včas nezasáhli, mohl by se zřítit
právě v důsledku ztráty rychlosti.
Směrovým kormidlem (směrovkou) u modelu ovládáme nejen zatáčení, ale
při průletu zatáčkou do jisté míry i náklon modelu.
Za normálních okolností model letí přímo bez náklonu s křídlem vodorovně. Za-
táčku naopak model prolétá v náklonu, do kterého model uvedeme křidélky.
Pro každou rychlost a poloměr zatáčky existuje určitý optimální náklon, kdy
model ztrácí minimum energie - to je důležité především v klouzavém letu, kde
ztráta energie znamená ztrátu výšky a zkrácení doby letu. Čím větší je rychlost
modelu a menší poloměr zatáčky, tím musí být náklon vyšší. Stabilní náklon v
zatáčce udržujeme právě pomocí optimální výchylky směrovky.
Zatáčka s křidélky a výškovkou
Předpokládejme, že nácvik průletu zatáčkou zahájíme ve vodorovném letu.
Zatáčka vyžaduje v ideálním případě koordinovanou práci všech tří ovládacích
ploch, která zajistí, že model prolétne zatáčku s minimální ztrátou výšky a trup
bude v každém okamžiku mířit ve směru tečny oblouku zatáčky. Pro začátek si
situaci zjednodušíme tím, že nebudeme používat směrovku, jejíž používání není
u modelu této kategorie úplně nezbytně nutné. Ve skutečnosti ale právě přede-
vším modely jako jsou větší větroně, hornoplošníky ve stylu Piper nebo Cessna,
provádějí zatáčku mnohem lépe i s použitím směrovky. Zatáčku (např. doleva)
začneme tím, že model nakloníme doleva vychýlením ovladače křidélek vlevo.
Úhel náklonu je úměrný poloměru zatáčky (a také rychlosti letu modelu) - čím
má být poloměr zatáčky menší, tím musí být náklon větší (ostrou zatáčku mů-
žeme “říznout” jenom tehdy, pokud má model dostatečnou rychlost). Začneme
jenom mírnou zatáčkou s náklonem 20-30 stupňů, ne více. Jakmile je model v po-
žadovaném náklonu (stále ještě letí přímo), vracíme ovladač křidélek do neutrálu
a současně začneme zatáčku točit citlivým přitažením výškovky. To je umožněno
tím, že nakloněná výškovka funguje zároveň také jako směrovka (malá ukázka
vektorové fyziky a skládání a rozkládání sil) - naštěstí nám přitažená výškovka
pomáhá zatáčku “točit”.
Přitažení výškovky je nezbytné také proto, že model v náklonu bude mít jistou
tendenci klesat - tím větší, čím je větší náklon. Je to dáno tím, že efektivní nosná
plocha křídla (svislý průmět křídla do vodorovné roviny) v náklonu je nižší, než
efektivní nosná plocha křídla ve vodorovné poloze, takže křídlo dává poněkud
nižší vztlak (tím nižší, čím vyšší je náklon). V zatáčce také musíme překonávat
setrvačné síly, které nutí model pokračovat v přímém letu atd. - bylo by to na
dlouhé povídání, zde nám jde jen o popis toho, jak se model v zatáčce řídí. Výš-
kovku přitahujeme jenom tolik, aby model zatáčku prolétal téměř vodorovně - s
trupem skoro rovnoběžným se zemí - s co nejmenším klesáním. Jakmile prolét-
neme zhruba 3/4 oblouku zatáčky, je čas model vychýlením křidélek na opačnou
stranu srovnat, současně se povoluje přitažení výškovky.
Pamatujte, že bez správného přitažení výškovky není možné zatáčkou proletět,
pokud nepřitáhnete nebo přitáhnete málo, model přejde do klesání (to je častá
začátečnická chyba pilotů, kteří si nedají říci a začínají sami - uvedou model do
první zatáčky po startu a potom už jen strnule přihlížejí, jak se model v sestup-
ném letu zapíchne do země). Pokud přitáhnete příliš, je to také špatně, protože
hrozí ztráta rychlosti a pád modelu.
Koordinovaná zatáčka s křidélky, výškovkou a směrovkou
V “předpisovém” provedení s použitím směrovky postupujeme podobně - model
nejdříve uvedeme křidélky do náklonu a s malým zpožděním vychýlíme směrov-
ku a přitáhneme výškovku - právě tak, aby model držel stálý náklon a v klouza-
vém letu ztrácel co nejméně výšku.
Zapojení směrovky do řízení se projeví takto: model jsme uvedli křidélky do ná-
klonu vlevo, vychýlíme směrovku doleva. Model začne zatáčet vlevo a začne kle-
sat - více, než v předchozím způsobu průletu zatáčky bez vychýlení směrovky. To
je způsobeno tím, že jakmile se směrovka vychýlí ze svislé roviny, začne zároveň
působit jako výškovka - a to jako výškovka vychýlená dolů, potlačená, nutící mo-
del klesat. Průlet zatáčky proto opět vyžaduje i práci s výškovkou - musíme ji mír-
ně přitáhnout, aby model zatáčku prolétal bez ztráty výšky (nebo jen s minimální
ztrátou v klouzavém letu bez motoru).
Ve skutečnosti je to tak, že směrovku spíše než k zatáčení, používáme k “ochot-
nějšímu” náletu do zatáčky a udržování modelu v optimálním náklonu dle letové
rychlosti a požadovaného poloměru zatáčky; výškovkou model udržujeme ve vo-
dorovném letu a zatáčíme. Pokud bychom zvolili příliš velký náklon neodpovídající
rychlosti modelu, bude třeba pro dosažení vodorovného letu příliš velká výchylka
výškovky, která rychlost modelu dále sníží, což může způsobit pád modelu.
Při vylétávání ze zatáčky vracíme směrovku do neutrální polohy, dle potřeby
“kontrujeme” výchylkou na opačnou stranu, křidélky vyrovnáváme náklon a po-
volujeme přitažení výškovky.
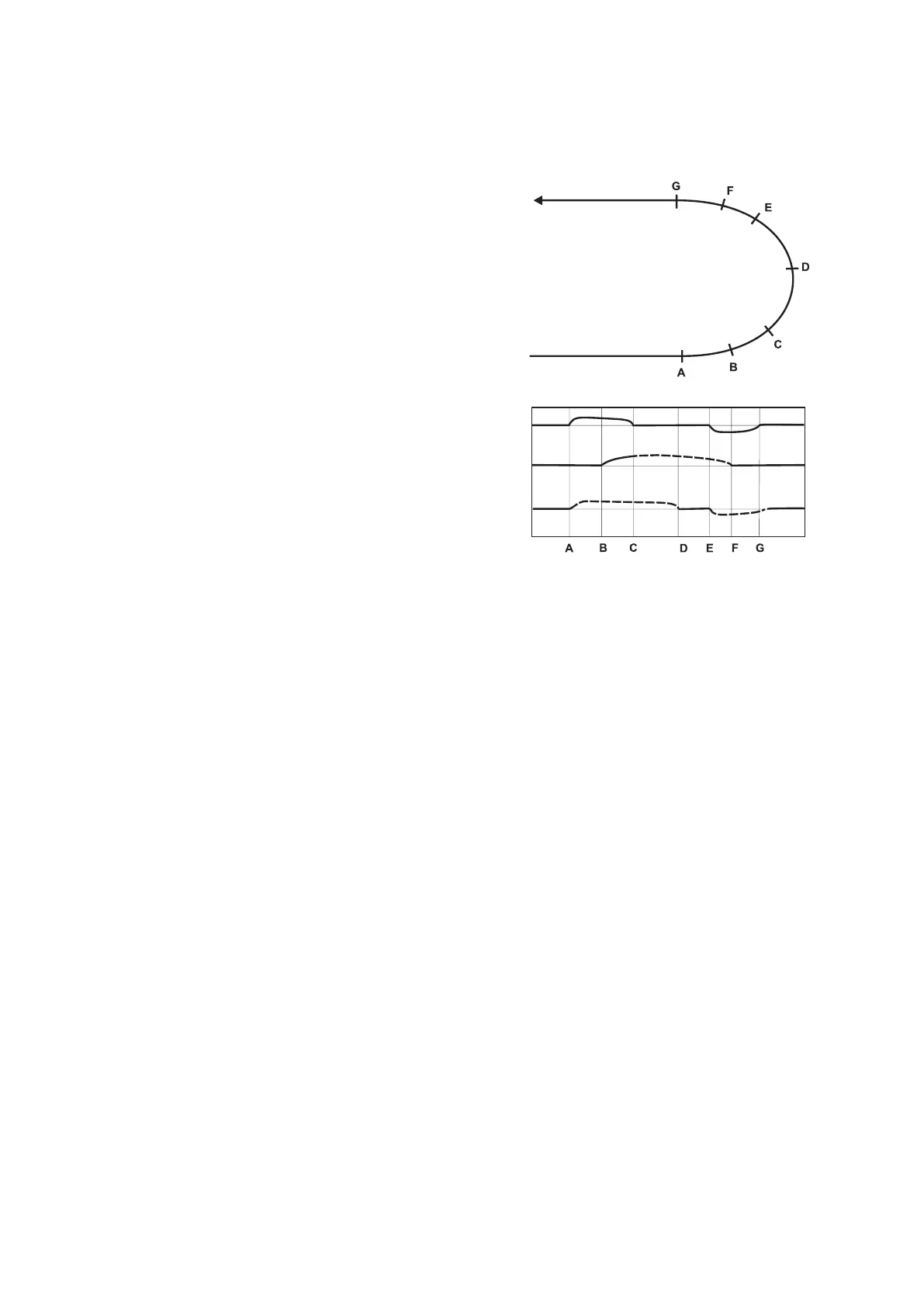
Podíváte-li se na obrázek s grackým znázorněním průletu zatáčkou, jistě si po-
všimnete, že modelu nejprve nějakou chvíli trvá, než začne zatáčet. A také, že při
vylétávání ze zatáčky je třeba náklon začít vyrovnávat dříve, než příď modelu
míří směrem, ve kterém má model letět po ukončení zatáčky.
Pozor: Aby letadlo mohlo letět, musí mít oproti okolnímu prostředí (vůči
vzduchu, nikoliv zemi!) určitou minimální rychlost (tzv. pádovou rychlost). To
znamená, že při letu po větru musí mít letadlo oproti zemi větší rychlost, aby
mohlo letět, než je tomu ve chvíli, kdy letí proti větru. To je také důvod proč
se startuje a přistává vždy proti větru - letadlo může mít oproti zemi menší
rychlost, a přece bezpečně letí!
Začátečníkům se často stává, že je vyleká zrychlení modelu při letu po vě-
tru a snaží se model zpomalit přitažením výškovky. Důsledkem může být
zpomalení modelu na úroveň nebo dokonce pod pádovou rychlost (říká se
tomu také “přetažení”), což se projeví pádem modelu při pokusu o přechod
do zatáčky proti větru. Pokud máte bezpečnou výšku, není vše ztraceno, ale
při přiblížení na přistání (kdy se současně stahuje plyn) je to jedna z častých
příčin havárií modelů i skutečných letadel.
Vytrimování za letu
Nyní již víme, jak model řídit, zbývá ještě jemně doladit nastavení neutrál-
ních poloh kormidel. Uveďte model do přímého letu bez motoru. Pokud se
model s ovladačem směrovky ve středové poloze stáčí do jednoho směru
místo přímého letu, vyrovnejte pomocí trimu pod ovladačem směrovky. Po-
kud se křídlo modelu naklání na jednu stranu, vyrovnejte vychýlením trimu
křidélek na opačnou stranu. Model také musí letět spořádaně - tj. letět stá-
lou rychlostí, nezpomalovat ani nezrychlovat, nehoupat. Případné odchylky
napravte pomocí trimu výškovky. Nalezení správného neutrálu křidélek a
směrovky vyžaduje odlišení toho, kdy je náklon nebo zatáčení modelu způ-
soben nedokonalostí modelu ve směru příčné nebo podélné osy. Jinak se
může stát, že sice dosáhnete toho, že model letí rovně a bez náklonu, ale trup
modelu je oproti přímému směru stočen do strany - model letí “bokem”. V
tom případě je třeba zmenšit výchylku trimu směrovky tak, aby trup modelu
mířil ve směru letu a náklon “dorovnat” trimem křidélek. (To je další důvod,
proč úvodní let a vytrimování svěřit zkušenému pilotovi.)
Co dělat, pokud je potřebná výchylka trimu velká?
Pokud je potřebná výchylka trimu křidélek, výškovky nebo směrovky větší,
než cca 1/4 rozsahu pohybu páčky trimu na jednu nebo druhou stranu, do-
poručujeme model dotrimovat mechanicky úpravou délky táhla. Velká vý-
chylka trimu na jednu stranu totiž omezuje “užitečnou” výchylku kormidla
na tuto stranu. Po přistání s vytrimovaným modelem ponechejte pohonný
akumulátor připojený a označte si polohu výchylky kormidla v neutrálu např.
na kousek papíru vsunutý mezi kormidlo a stabilizátor. Trim daného kaná-
lu vraťte do středové polohy, uvolněte stavěcí šroub variabilní koncovky na
páce kormidla a táhlo dle potřeby zkraťte nebo prodlužte. Stavěcí šroub opět
dotáhněte a při dalším letu ověřte správnost vytrimování.
Koordinovaná zatáčka doleva (180°)
Náklon doleva
Vyrovnávání náklonu
Přímý a vodorovný let
Výchylky směrovky a výškovky
Udržujte
stálý náklon,
rychlost a
výšku
Výškovka
Směrovka
Vlevo
Vpravo
Nahoru
Dolů
Přímý a vodorovný let
Křidélka
Vlevo
Vpravo
 Loading...
Loading...



