Measurement Ranging Times
Table
3-13
through Table 3-16list range change times for
!-measure
and
V-measure for both fixed range
and
autorange. Typical times are given for
416J.1Sec
and
16.67msec integrations. The times are from the start of a
range change until a reading
is
in
the buffer, including
the measure time (1msec
or
24msec).
Determining the range change time for fixed ranges is a
simple table look-up of present range
and
next range. For
autoranging, range change times depend on the follow-
ing factors:
•
Integration time
•
Starting
and
ending range
• Source
or
measure range change
•
Direction of range change (up
or
down)
•
Compliance value (when upranging)
•
User-programmable sweep delay (assume
Omsec
for
this discussion)
•
Default delay (used whether enabled
or
not with W
command)
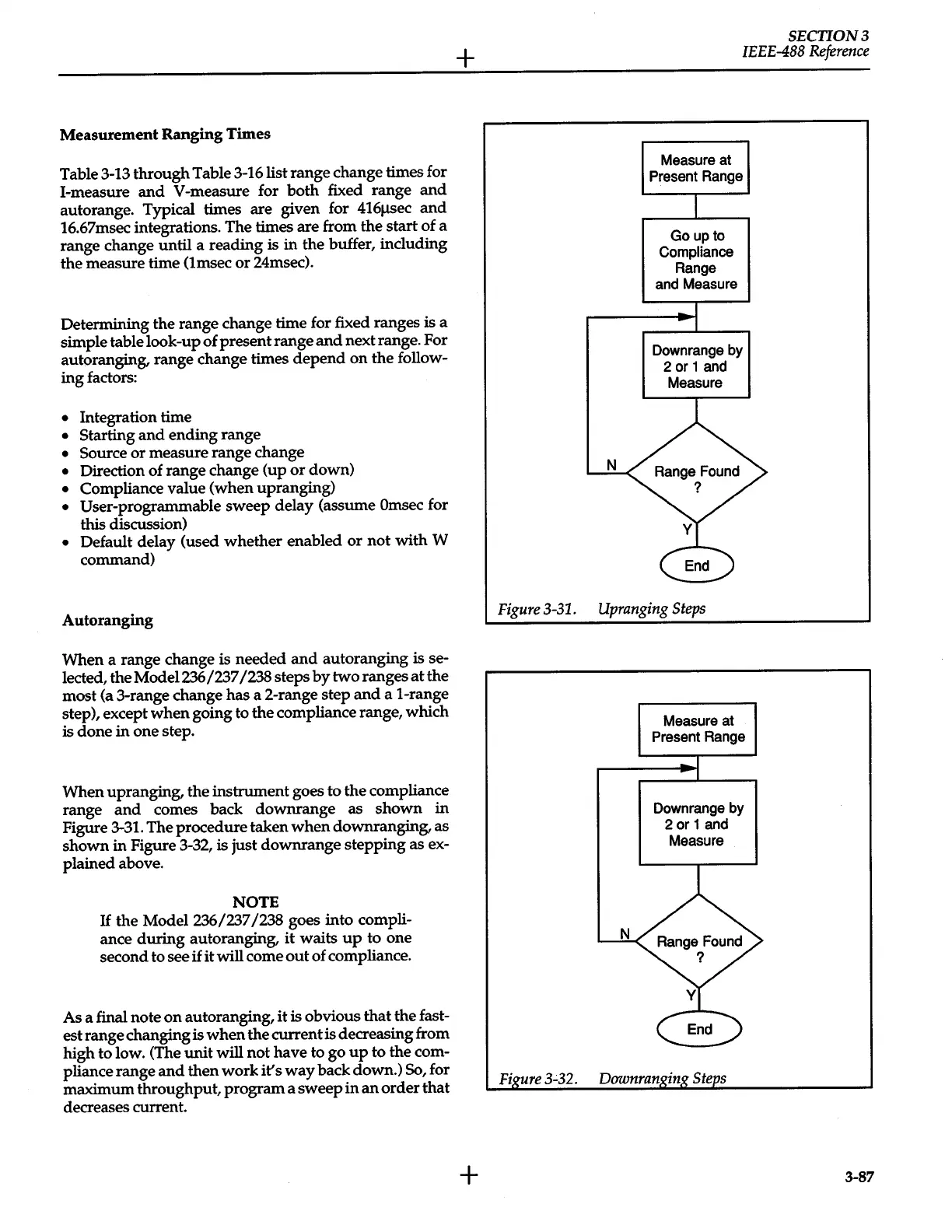
Auto ranging
When a range change is needed
and
autoranging
is
se-
lected, the Model236 /237/238 steps
by
two ranges
at
the
most (a 3-range change has a 2-range step
and
a 1-range
step), except
when
going to the compliance range, which
is
done in one step.
When upranging, the instrument goes to the compliance
range
and
comes back downrange as shown
in
Figure
3-31.
The procedure taken
when
downranging, as
shown
in
Figure 3-32,
is
just downrange stepping as ex-
plained above.
NOTE
If
the Model236/237 /238 goes into compli-
ance during autoranging,
it
waits
up
to one
second to see
if
it
will
come
out
of
compliance.
As a final note
on
autoranging,
it
is
obvious that the fast-
est range changing
is
when
the current
is
decreasing from
high to low. (The unit will not have to go
up
to the com-
pliance range
and
then work it's
way
back down.)
So,
for
maximum throughput, program a sweep in
an
order that
decreases current.
+
+
N
Measure at
Present Range
Go
up to
Compliance
Range
and Measure
Downrange by
2or1and
Measure
Figure
3-31.
Upranging
Steps
Fi
ure3.;32.
Measure at
Present Range
Downrange by
2
or
1 and
Measure
SECT10N3
IEEE-488
Reference
3-87
 Loading...
Loading...









