Function library
Positioning control
3.4.8 Homing
3−53
l
EDSVS9332P−EXT DE 2.0
3.4.8.7 Homing modes 6 and 7
Purpose
l Homing in all positioning modes (C1210 = 0, 1, 2).
l Use of touch probe if the index pulse does not appear at the same place in a reproducible
form due to the mechanical constellation. The index signal can also be mechanically shifted
after a motor exchange.
l The homing switch (POS−REF−MARK) must be in direction of the movement.
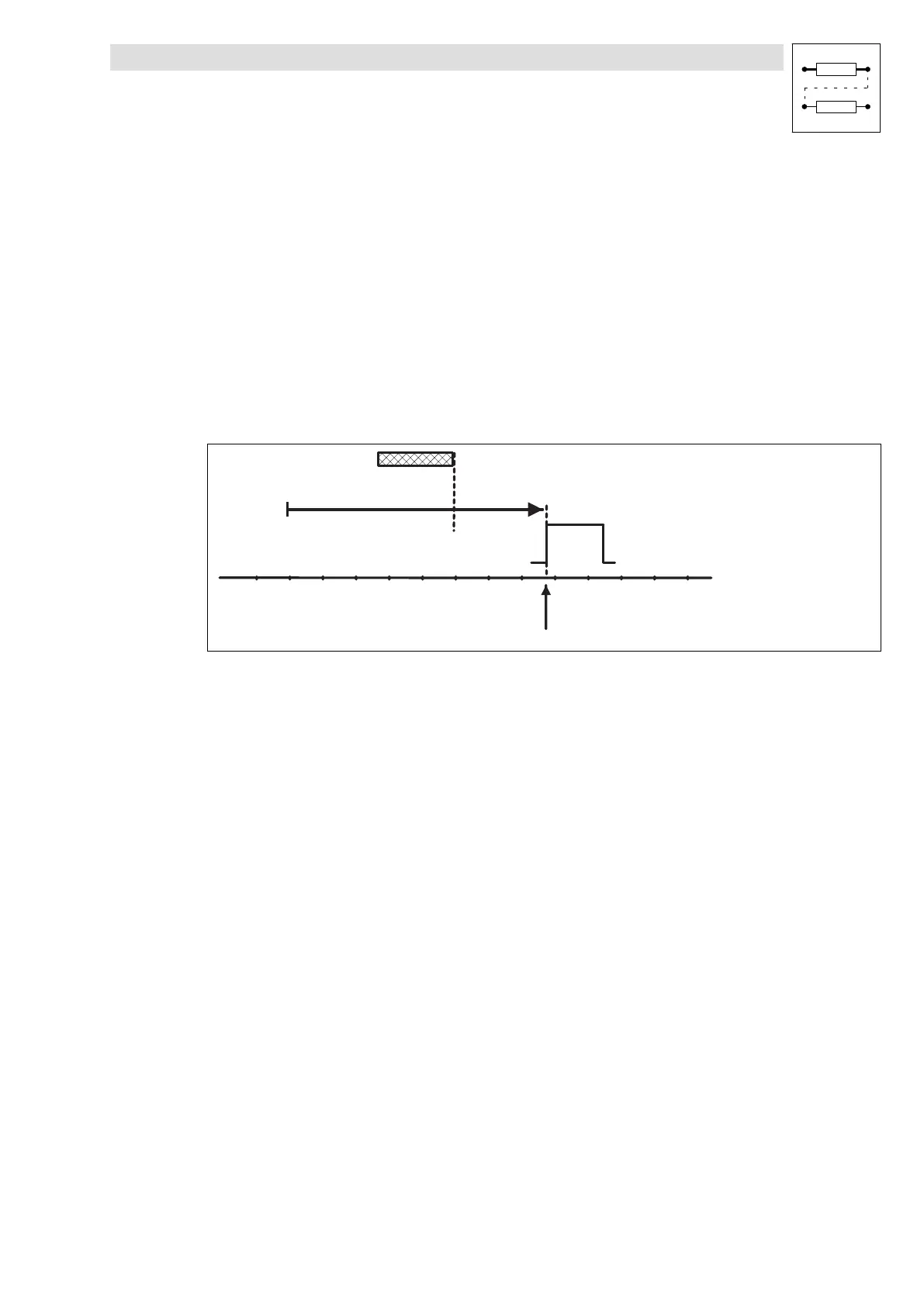
Travelling to TP signal via homing switch
Mode 6: Traversing direction to the positive end of the travel range limit switch
Set C1213 = 6.
Home position
TP signal
Homing switch (POS-REF-MARK)
9300pos054
Fig. 3−19 Move to TP signal via POS−REF−MARK
The following settings are necessary:
l Select terminal for TP initiator via C1214.
– C1214 = 1 ¢ terminal X5/E1.
– C1214 = 2 ¢ terminal X5/E2.
– C1214 = 3 ¢ terminal X5/E3.
– C1214 = 4 ¢ terminal X5/E4 (This setting is recommended by LENZE).
l Select edge of the TP input via C1215.
– C1215 = 0 ¢ LOW−HIGH edge.
– C1215 = 1 ¢ HIGH−LOW edge.
Function sequence
l Move to the home position with homing speed (C1242) towards positive end of travel range
limit switch overtravelling the homing switch.
l After leaving the homing switch the reference point is determined by the TP signal. TP signals
that occurred before are ignored.
l The drive can be on the homing switch before homing.
Mode 7: Traversing direction to negative end of travel range limit switch
Set C1213 = 7.
Function sequence
l As "Traversing direction to positive end of travel range limit switch", but the drive moves
towards the negative end of travel range limit switch.