.
,
1
MDS-A-SVJ
1
I
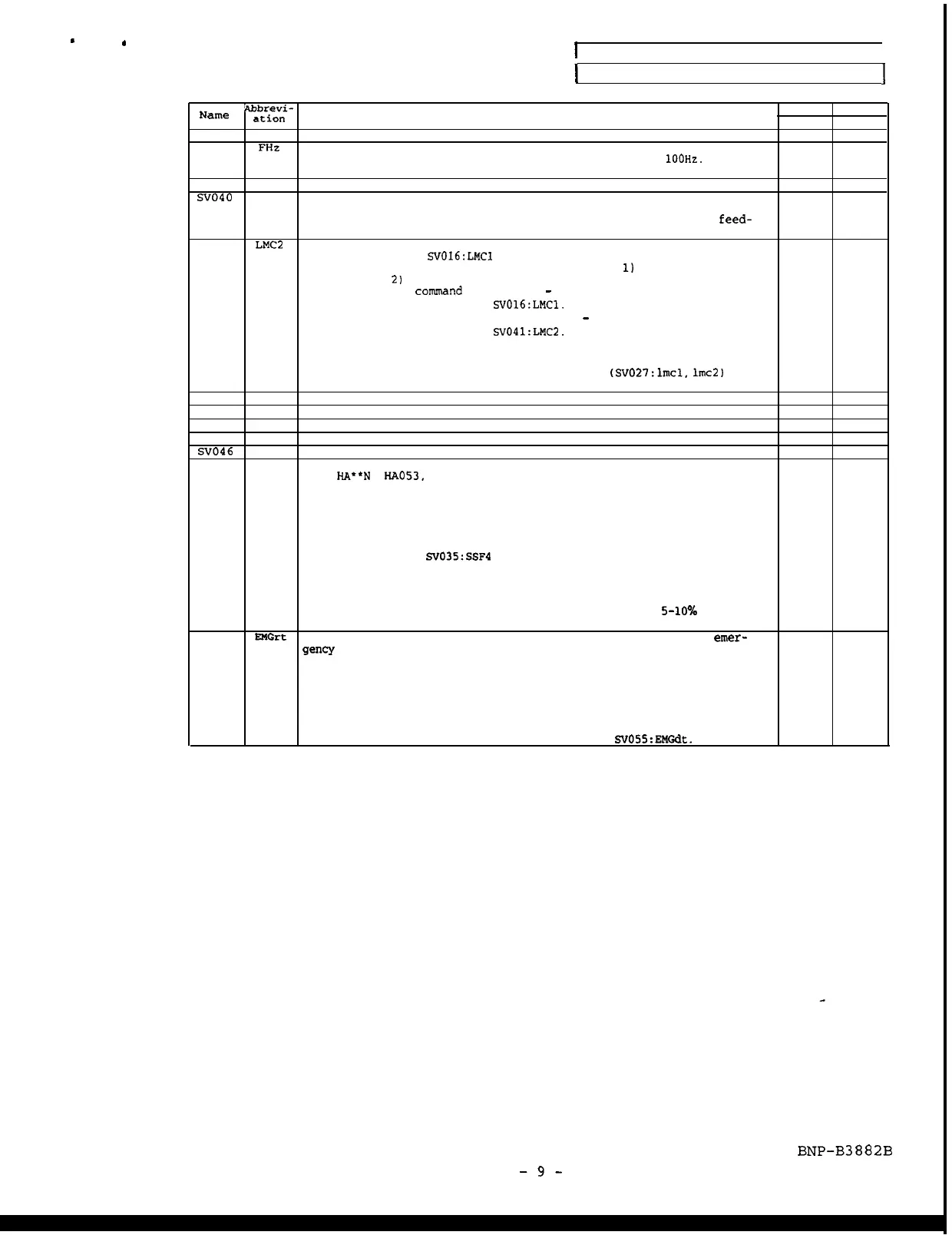
Parameter Descriptions
1
Name
Abbrevi-
Description
Setting range
ation
Minimum Maximum
svo37 Must be set to zero.
SV038
FHz
Sets mechanical vibration suppression frequency if mechanical
0
3000
vibration suppression is required. Must be set over
100Hz.
Set to
zero when not in use.
svo39 Must be set to zero.
svo40
LMCT
Sets lost motion correction dead zone.
0
100
Normally set to zero.
Set only if lost motion correction timing is incorrect when
feed-
forward control is used.
svo41
LMC2
Normally set to zero.
-1
200
Set together with
SV016:LMCl
only when different setting values are
desired for lost motion correction gain (type
11
or correction
amount (type
21
according to the command direction.
To change the
command
speed from
-
to + (with clockwise command
direction),
set value to
SV016:LMCl.
To change the command speed from + to
-
(with clockwise command
direction),
set value to
SV041:LMC2.
If -1 is set,
correction is not carried out during command speed
direction changes.
Only effective when lost motion correction
(SV027:lmcl.
lmc21
is
selected.
SV042 Must be set to zero.
svo43
Must be set to zero.
svo44 Must be set to zero.
svo45 Must be set to zero.
SVO46 Must be set to zero.
svo47
EC
Sets effective gain for induced voltage correction. Compatible only
0
200
with
HA**N
HAo53,
Using this
and HA13 motors.
function,
the feedback current's ability to follow the
command current can be increased and the deceleration torque
increased.
The standard setting is 100, but the following adjustments must
be made:
Set bit 0 of
SVO35:SSF4
to 1 and thus display the command cur-
rent peak in the MAX current 1 display on the servo monitor
and the feedback current peak in the MAX current 2 display.
Next, carry out acceleration/deceleration and set adjust the
setting such that the feedback current peak is S-10% smaller,
than the command current peak.
SV048
EMGrt
Sets time between an emergency stop (caused by an external
emer-
0
1000
gency
stop input,
insufficient voltage, or alarm) and ready ON.
Used to prevent vertical axes from dropping after an emergency
stop.
Note that
the time set by this parameter becomes ready-ON even if
a deceleration-controllable alarm occurs. Generally, this parame-
ter should be set to the minimum value that enables the electro-
magnetic brake to operate for the required time. This parameter's
time setting must be smaller than that of
SV055:EMGdt.
-9-
BNP-B3882B
 Loading...
Loading...

