3.4Encoder reset and encoder correction
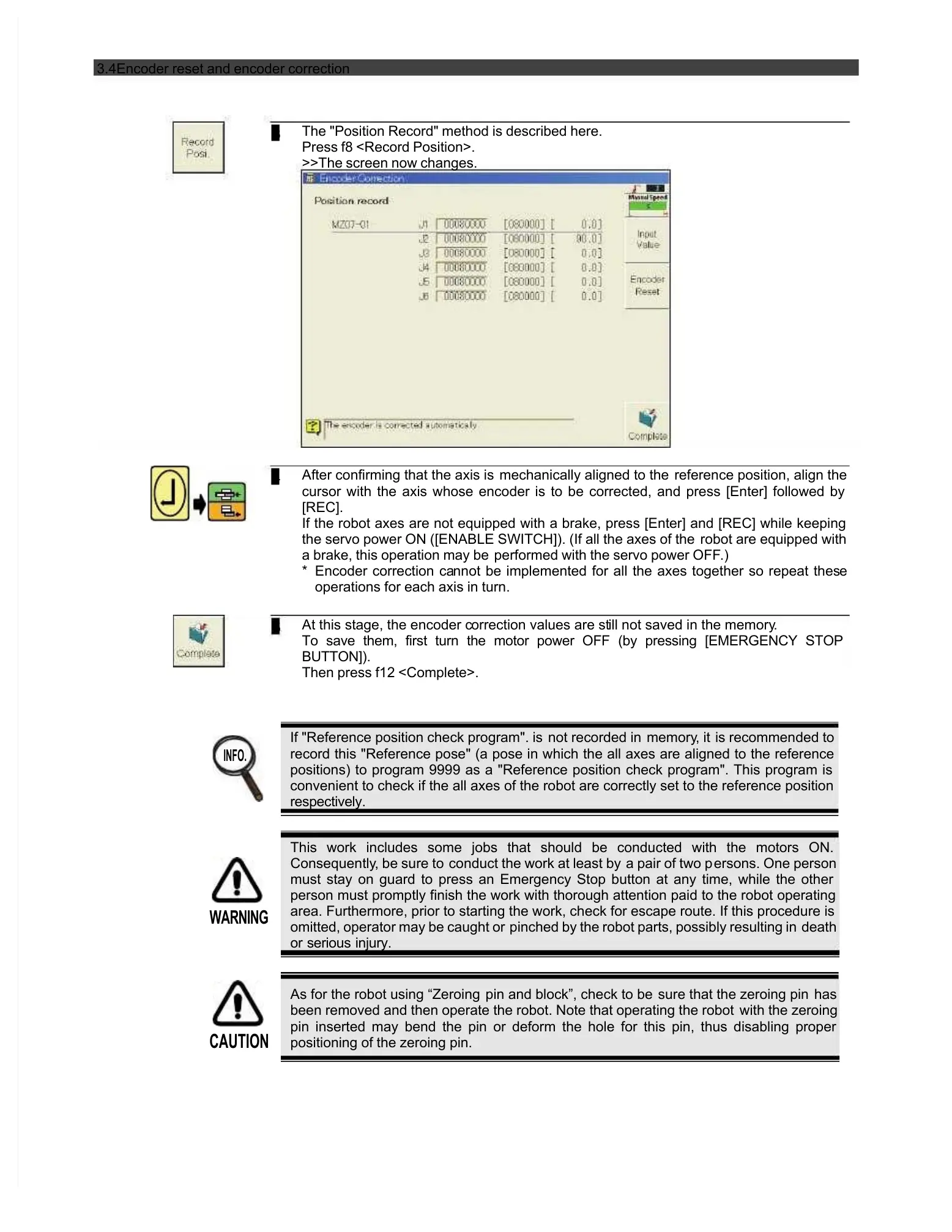
The "Position Record" method is described here.
Press f8 <Record Position>.
>>The screen now changes.
After confirming that the axis is
mechanically aligned to the
reference position, align the
cursor with the axis whose encoder is to be corrected, and press [Enter] followed by
If the robot axes are not equipped with a brake, press [Enter] and [REC] while keeping
the servo power ON ([ENABLE SWITCH]). (If all the axes of the
a brake, this operation may be
performed with the servo power OFF
nnot be implemented for all the axes together so repeat thes
operations for each axis in turn.
At this stage, the encoder c
ill not saved in the memory
To save them, first turn the motor power OFF (by pressing [EMERGENCY STOP
Then press f12 <Complete>.
If "Reference position check program". is
record this "Reference pose" (a pose in which the all axes are aligned to the reference
positions) to program 9999 as a "Reference position check program". This program is
convenient to check if the all axes of the robot are correctly set to the reference position
This work includes some jobs that should be conducted with the motors ON.
conduct the work at least by
must stay on guard to press an Emergency Stop button at any time, while the other
person must promptly finish the work with thorough attention paid to the robot operating
area. Furthermore, prior to starting the work, check for escape route. If this procedure is
omitted, operator may be caught or
pinched by the robot parts, possibly resulting in
As for the robot using “Zeroing
pin and block”, check to be
sure that the zeroing pin
been removed and then operate the robot. Note that operating the robot
pin inserted may bend the pin or deform the hole for this pin, thus disabling proper
positioning of the zeroing pin.
 Loading...
Loading...