3.5 Tool constant settings
The “tool constants” refer to a set of parameters including the length, angle, center of gravity, weight and
moment of inertia of the installed tool. These parameters are extremely important for ensuring precise linear
operations and appropriate acceleration/deceleration control. Before moving the robot, read carefully through
the instructions in this section and take the
steps described without fail. Tool constants for up to 32
stored in this controller’s memory. If an application involves the use of a multiple number of tools, perform the
settings for all the tools
Continued use under the wrong settings for the center of gravity, weight and tool’s
moment of inertia may fatally damage the machine. Perform the settings set forth in this
The settings must be performed even for small and/or lightweight tools. The same
settings used for a large tool cannot be used for a small tool.
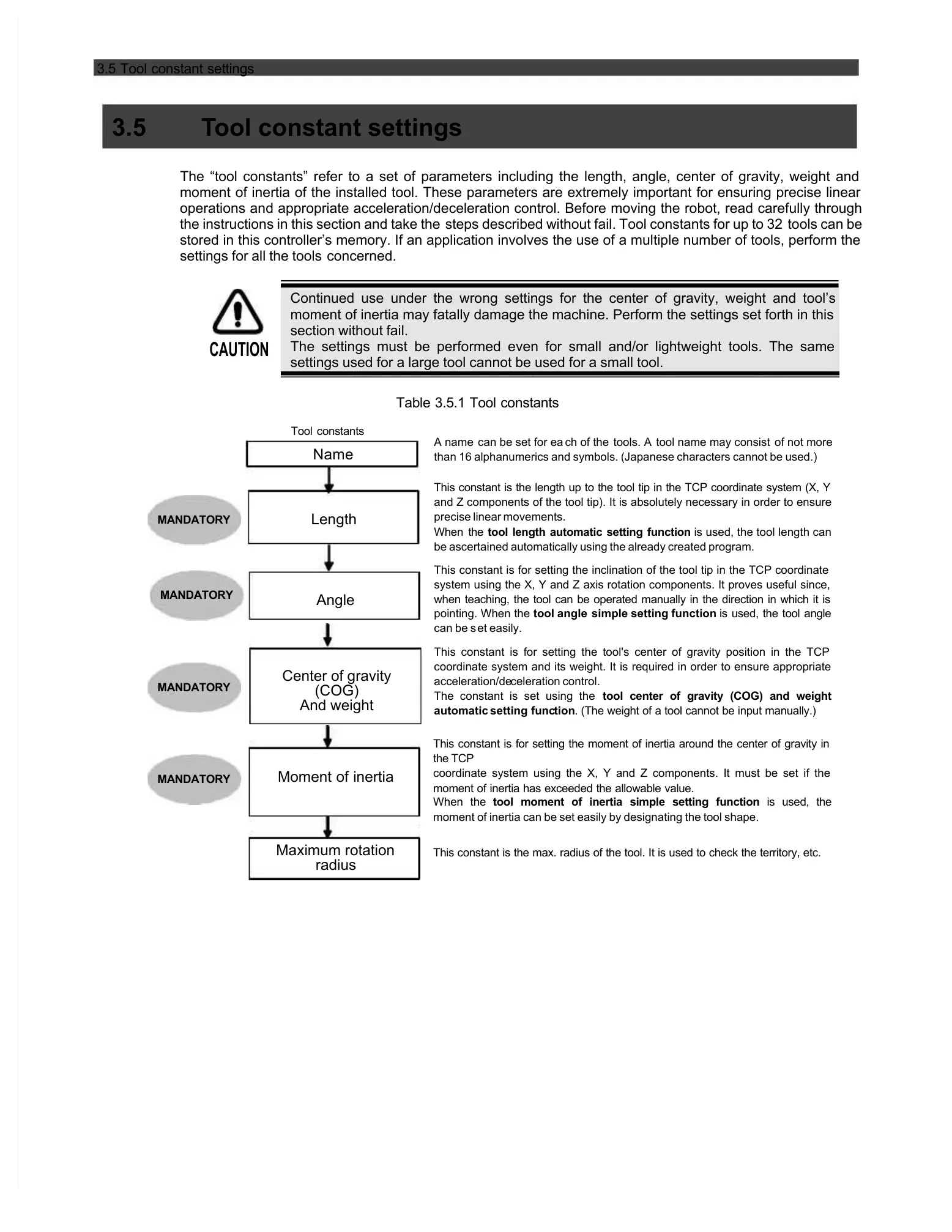
Table 3.5.1 Tool constants
This constant is the length up to the tool tip in the TCP coordinate system (X, Y
and Z components of the tool tip). It is absolutely necessary in order to ensure
precise linear movements.
tool length automatic setting function
is used, the tool length can
be ascertained automatically using the already created program.
This constant is for setting the inclination of the tool tip in the TCP coordinate
system using the X, Y and Z axis rotation components. It proves useful since,
when teaching, the tool can be operated manually in the direction in which it is
This constant is for setting the tool's center of gravity position in the TCP
coordinate system and its weight. It is required in order to ensure appropriate
The constant is set using the
tool center of gravity (COG) and weight
. (The weight of a tool cannot be input manually.)
than 16 alphanumerics and symbols. (Japanese characters cannot be used.)
This constant is for setting the moment of inertia around the center of gravity in
coordinate system using the X, Y and Z components. It must be set if the
moment of inertia has exceeded the allowable value.
tool moment of inertia simple setting function
moment of inertia can be set easily by designating the tool shape.
This constant is the max. radius of the tool. It is used to check the territory, etc.
 Loading...
Loading...