29
su vibrací do snímačů a zmizí, jakmile se vrtulník odlepí od země. Pokud vychýlíte trim, vrtulník se ihned po vzletu nakloní v daném směru.
Starten Sie mit dem Hubschrauber.
ACHTUNG: Wenn sich die Taumelscheibe neigt, bevor sie abheben, versuchen Sie nicht, sie von Hand zu trimmen. Die Neigung ist die Folge der Rückübertra-
gung von Vibrationen in die Sensoren, und verschwindet, sobald der Hubschrauber vom Boden abhebt. Wenn Sie die Trimmung verändern, neigt sich der
Hubschrauber sofort nach dem Start in diese Richtung.
Step 2 / Krok 2 / Schrit 2
With the helicopter hovering, observe for any rapid left/right or forward/aft oscillations.
If forward/aft oscillation is observed, land the helicopter and decrease the pitch gyro gain on the ight control unit and test again. Do this until oscillation
disappears.
If left/right oscillation is observed, land the helicopter and decrease the roll gyro gain on the ight control unit and test again. Do this until oscillation di-
sappears.
Uveďte vrtulník do visení a sledujte, zda nedochází k rychlému chvění vrtulníku ve směru vpřed/vzad nebo vlevo/vpravo.
Pokud vrtulník osciluje vpřed/vzad, s vrtulníkem přistaňte a snižte zisk klopení na řídící jednotce a znovu vzlétněte. Postup opakujte, dokud oscilace nezmizí.
Pokud vrtulník osciluje vlevo/vpravo, s vrtulníkem přistaňte a snižte zisk klonění na řídící jednotce a znovu vzlétněte. Postup opakujte, dokud oscilace nezmizí.
Bringen Sie den Hubschrauber in den Schwebeug und achten Sie auf schnelle Vibrationen des Hubschraubers in Vorwärts/Rückwärts- oder Links/Rechts-
-Richtung.
Sollte der Hubschrauber vorwärts/rückwärts schwingen, landen Sie den Hubschrauber und reduzieren Sie den Ausschlag des Kippens an der Steuereinheit
und starten Sie erneut. Wiederholen Sie den Vorgang, bis die Schwingung verschwindet.
Wenn der Hubschrauber nach links/rechts schwingt, landen Sie den Hubschrauber und reduzieren Sie den Ausschlag des Neigens an der Steuereinheit und
starten Sie erneut. Wiederholen Sie den Vorgang, bis die Schwingung verschwindet.
Step 3 / Krok 3 / Schrit 3
If drift of tail occurs during hovering, or delay of yaw response when centring the rudder stick, the yaw neutral is set improperly or the yaw gyro gain is too
low - reset the neutral again or decrease the yaw gyro gain on the ight control unit.
If the tail oscillates at hover or full throttle, the yaw gyro gain is too high - decrease the yaw gyro gain on the ight control unit.
Pokud při visení dochází k otáčení ocasu nebo odezva bočení při návratu ovladače bočení do neutrálu je opožděná, je nesprávně nastavený neutrál bočení
nebo je zisk gyra pro bočení příliš nízký - znovu nastavte neutrál nebo zvyšte zisk gyra bočení na řídící jednotce.
Pokud se při visení nebo plném plynu ocas chvěje ze strany na stranu, je zisk gyra bočení příliš vysoký - snižte zisk gyra bočení na řídící jednotce.
Wenn das Heck im Schwebeug rotiert oder das Gieren verzögert reagiert, wenn der Gierknüppel in die Neutrallage zurückkehrt, ist die Neutrallage des
Gierens falsch eingestellt oder der Gyro-Ausschlag des Gierens ist zu niedrig - stellen Sie die Neutrallage neu ein oder erhöhen Sie den Gyro-Ausschlag an
der Steuereinheit.
Wenn das Heck im Schwebeug oder bei Vollgas von einer Seite zur anderen wackelt, ist der Gyro-Ausschlag des Gierens zu hoch - reduzieren Sie den Gyro-
-Ausschlag des Gierens an der Steuereinheit.
Step 4 / Krok 4 / Schrit 4
Put your helicopter into fast forward ight from hovering. If similar oscillation is observed (see step 2), reduce the pitch gyro gain. If your helicopter pitches
up, or responds slowly, increase the pitch gyro gain. Repaet this test until the oscillation is eliminated. Similar method could be used for the roll gyro gain.
Z visení přejděte do rychlého letu přímo vpřed. Pokud se objeví podobné chvění vrtulníku jako v předchozím kroku, snižte zisk gyra pro klopení. Pokud vrtul-
ník vzpíná příď nebo reaguje pomalu, zisk zvyšte. Postup opakujte, dokud nejsou oscilace odstraněny. Obdobně vylaďte i nastavení zisku klonění.
Gehen Sie aus dem Schwebeug in einen schnellen Geradeausug über. Wenn Sie ein ähnliches Wackeln des Hubschraubers wie im vorherigen Schritt fest-
stellen, reduzieren Sie den Gyro-Ausschlag des Kippens. Wenn der Hubschrauber den Bug hebt oder langsam reagiert, erhöhen Sie den Ausschlag. Wieder-
holen Sie den Vorgang, bis die Schwingungen beseitigt sind. Der Ausschlag des Neigens wird in ähnlicher Weise eingestellt.
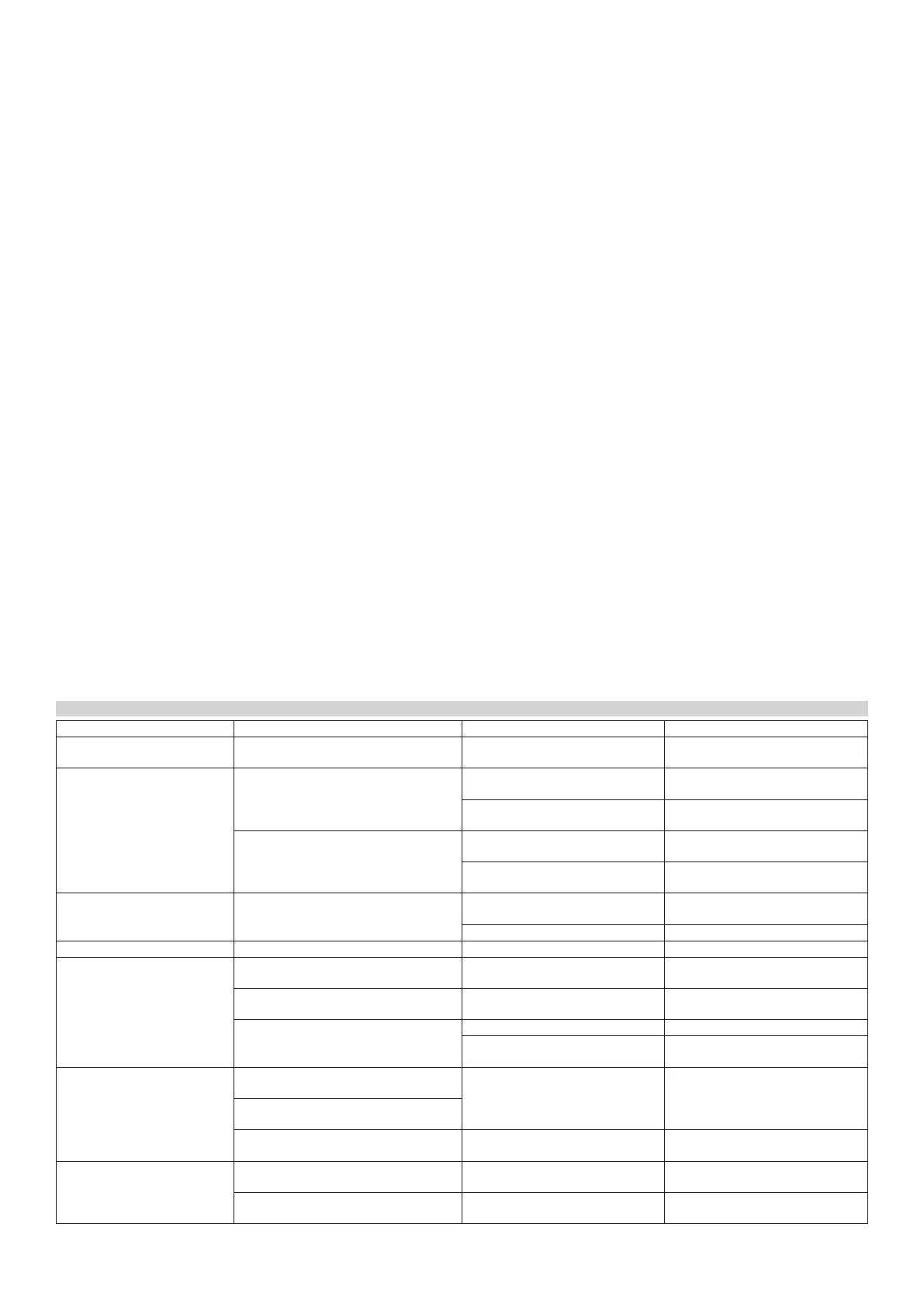
TROUBLESHOOTING GUIDE / PRŮVODCE V NESNÁZÍCH / HILFE BEI SCHWIERIGKEITEN
Problem Cause Solution
Blade tracking Blade tracking is o
Pitch linkage push rods are not even
length
Adjust length of pitch linkage push
rods
Hover
Headspeed too low
Excessive collective pitch
Adjust length of pitch linkage push
rods to reduce pitch
Hovering throttle curve is too low
Increase throttle curve at hovering
point on your transmitter
Headspeed too high
Not enough collective pitch
Adjust length of pitch linkage push
rods to increase pitch
Hovering throttle curve is too high
Decrease throttle curve at hovering
point on your transmitter
Yaw response
Drifting of tail occurs during hovering, or
delay of yaw response when centring the
rudder stick
Yaw (rudder) neutral point improper-
ly set
Reset yaw (rudder) neutral point
Yaw gyro gain too low Increase yaw (rudder) gyro gain
Tail oscillates at hover or full throttle Yaw gyro gain too high Decrease yaw (rudder) gyro gain
Oscillation during ight
Forward/aft oscillation when elevator
(pitch) is applied
Pitch (elevator) gyro gain too high Decrease pitch (elevator) gyro gain
Helicopter front bobbles (nods) during
forward ight
Worn servo or slack in control links
Replace servo, ball link or linkage
balls
Left/right oscillation when aileron (roll) is
applied
Roll (aileron) gyro gain too high Decrease roll (aileron) gyro gain
Worn servo or slack in control links
Replace servo, ball link or linkage
balls
Drifting during ight
Elevator (pitch) input causes helicopter to
drift
Pitch (elevator) gyro gain too low Increase pitch (elevator) gyro gain
Helicopter pitches up during forward i-
ght
Aileron (roll) input causes helicopter to
drift
Roll (aileron) gyro gain too low Increase roll (aileron) gyro gain
Control response
Slow forward/aft/left/right input response Roll/pitch rate too low
Increase the roll/pitch rates on the i-
ght control unit
Sensitive forward/aft/left/right input re-
sponse
Roll/pitch rate too high
Decrease the roll/pitch rates on the
ight control unit
If above listed solution does not resolve your issues, please check with experienced pilots or contact your OMP HOBBY dealer.

 Loading...
Loading...
