12 - 33
12 Troubleshooting and Maintenance
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
12-4 Troubleshooting
12
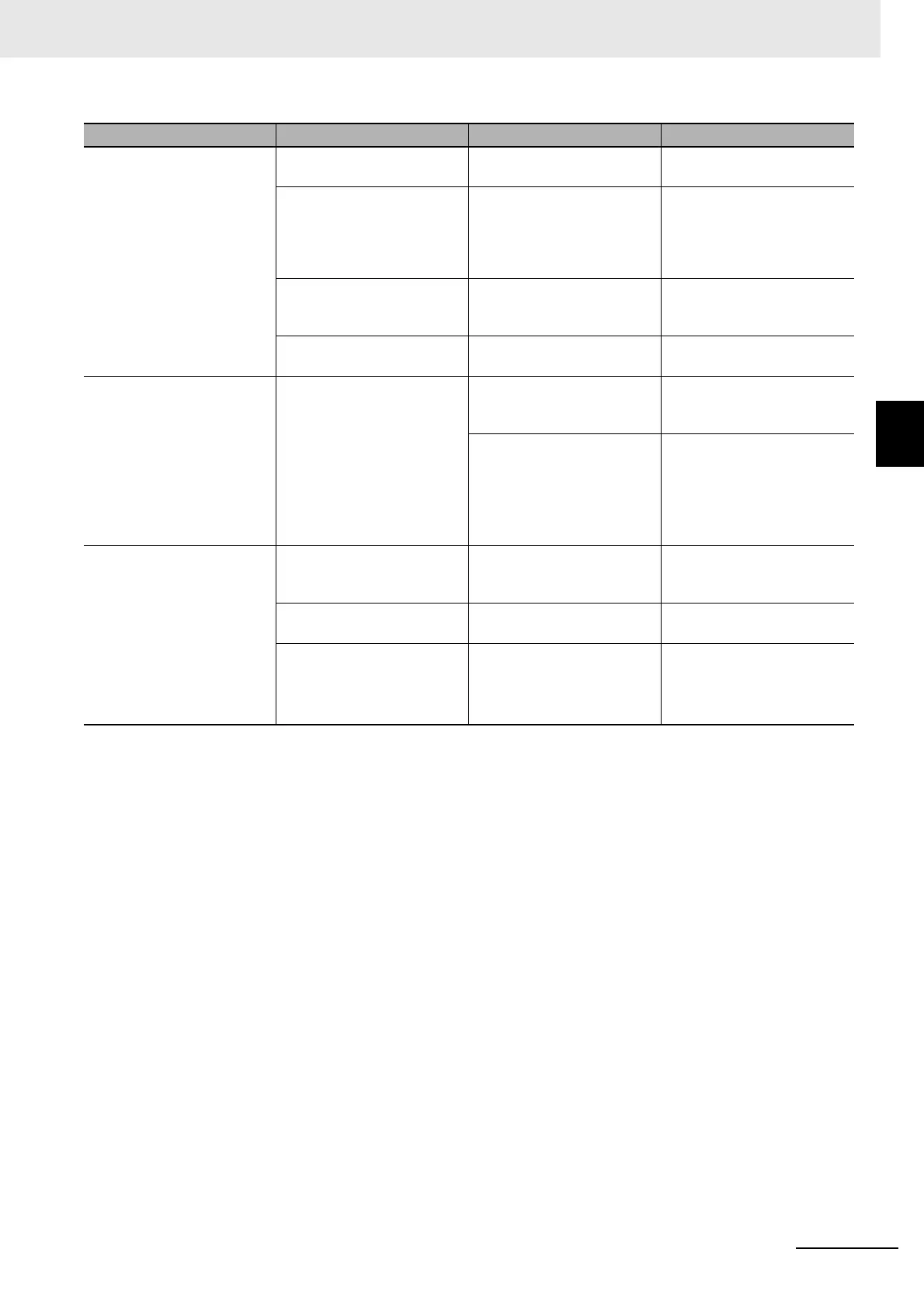
12-4-3 Troubleshooting Using the Operation State
Overshooting at startup or
when stopping
The Position Loop Gain 1
(3100 hex) is too large.
Review the setting of object
3100 hex.
Adjust the gain to prevent
overshooting.
The Speed Loop Gain 1
(3101 hex) and the Speed
Loop Integral Time Constant
1 (3102 hex) are balanced
incorrectly.
Review the set values of
objects 3101 hex and
3102 hex.
Use the CX-Drive or the
analog monitor to measure
the response and adjust the
gain.
The machine rigidity set by
realtime autotuning is
incorrect.
Review the setting of the
machine rigidity.
Match the machine rigidity
setting to the load rigidity.
The set mass ratio differs
from the load.
Review the set value of the
Mass Ratio (3004 hex).
Adjust the set value of object
3004 hex with the load.
Vibration is occurring at the
same frequency as the
power supply.
Inductive noise is occurring. Check to see if the drive
control signal lines are too
long.
Shorten the control signal
lines.
Check to see if the control
signal lines and power
supply lines are bound
together.
• Separate control signal
lines from power supply
lines.
• Use a low-impedance
power supply for control
signals.
The position is misaligned.
(Position misalignment
occurs without an error being
output.)
The coupling of the
mechanical system is
insufficient.
Check to see if the
mechanical system is
misaligned.
Correct the coupling of the
mechanical system.
The gain is wrong. – Check if manual tuning can
achieve proper adjustment.
The load mass is too large. • Check the load mass.
• Check the motor speed.
• The dynamic brake
resistance is disconnected.
• Review the load mass.
• Replace the motor and
Servo Drive with proper
ones.
Symptom Probable cause Items to check Measures
 Loading...
Loading...
