9 - 35
9 Servo Parameter Objects
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
9-5 Interface Monitor Settings
9
• Select the condition under which the positioning completion signal (INP1) is output.
Explanation of Settings
The setting of this parameter affects the detection condition for the Target reached flag in
Statusword (6041 hex).
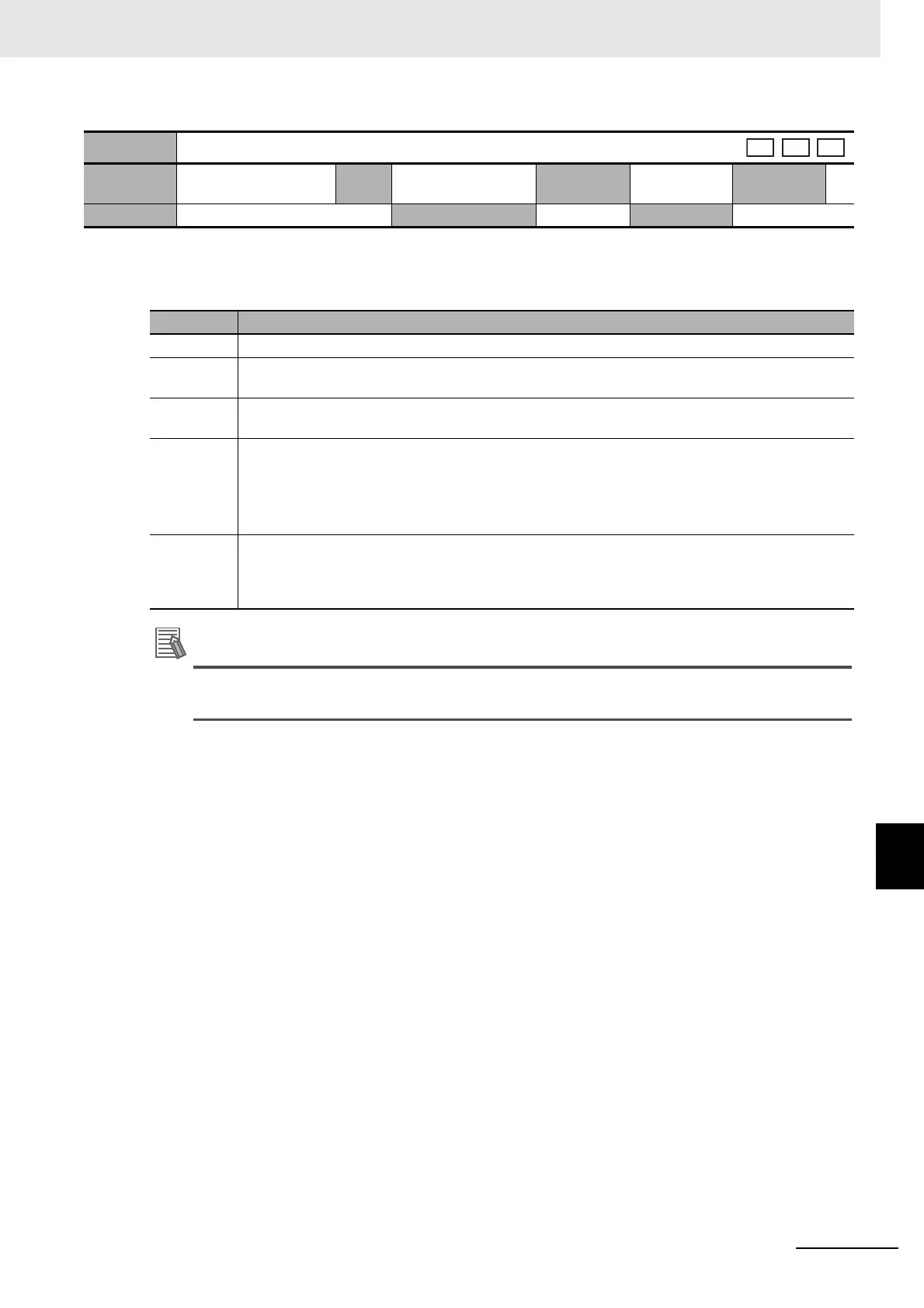
3432 hex
Positioning Completion Condition Selection
Setting
range
0 to 4
Unit
–
Default
setting
0 Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Not possible
Set value Description
0 Turn ON when the position error is equal to or lower than the Position window (6067 hex).
1 Turn ON when there is no position command and the position error is equal to or lower than the
Position window (6067 hex).
2 Turn ON when there is no position command, the zero speed detection signal is ON, and the
position error is equal to or lower than the Position window (6067 hex).
3 Turn ON when there is no position command and the position error is equal to or lower than the
Position window (6067 hex). Then, hold the ON state for the time set in the Positioning Completion
Hold Time (3433 hex).
After the Positioning Completion Hold Time expires, turn the INP1 output ON or OFF according to
the position command and position error at that time.
4 Turn ON when there is no position command and the position error is equal to or lower than the
Position window (6067 hex). Positioning starts when the time set in the Positioning Completion
Hold Time (3433 hex) has expired since the transition from a “position command present” to “no
position command” state.
csp
hm
 Loading...
Loading...
