9 Servo Parameter Objects
9 - 60
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• Set the time constant of FIR filter for the position command.
• The Position command FIR filter can be selected to enable or disable, by the position command filer
switch input via EtherCAT communications.
• Enable and disable the position command FIR filter in the Motion profile type (6086 hex).
• It can be set only when the Communications synchronization is 1 ms or more.
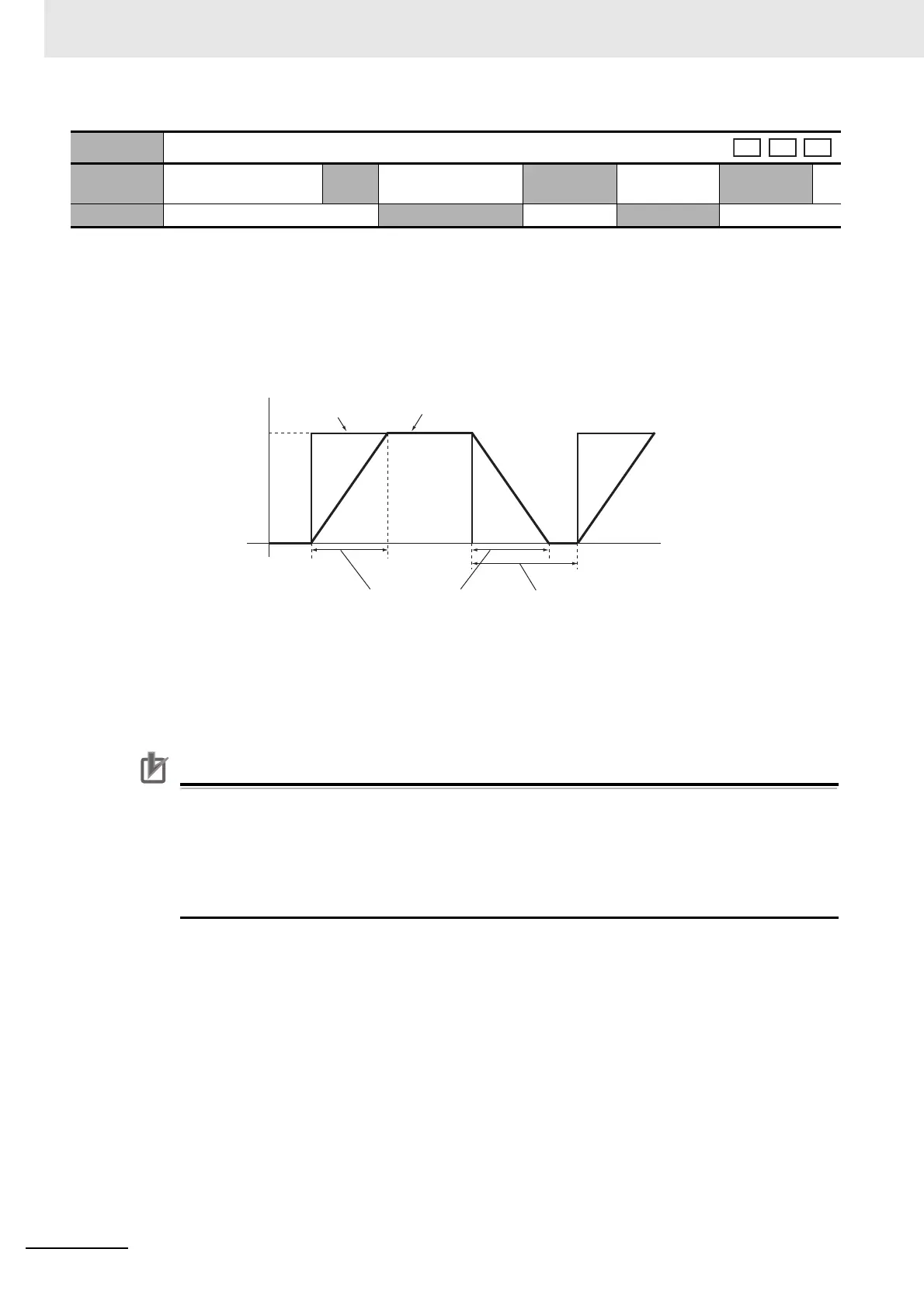
• It sets the time to arrive at the target speed Vc, as shown below, for the square-wave command of Vc.
*1 Change the Position Command FIR Filter Time Constant (3818 hex) setting only after the command pulse
stops and the filter switching dwell time elapses.
The dwell time is calculated by the following formulas depending on the value set on 3818 hex. If 3818 hex set
value is less than 10 ms, the set value × 0.1 ms + 0.25 ms. If 3818 hex set value is more than 10 ms, the set
value × 0.1 ms × 1.05.
Precautions for Correct UsePrecautions for Correct Use
• If the Position Command FIR Filter Time Constant (3818 hex) is changed when the position
command is entered, the change is not reflected immediately. It is updated only after the
subsequent state of no position command persists for the filter switching dwell time.
• There is some time lag from when the Position Command FIR Filter Time Constant (3818 hex)
is change and to when the change is applied. If the filter switching dwell time elapses during
the lag, the change may be suspended.
3818 hex
Position Command FIR Filter Time Constant
Setting
range
0 to 10,000
Unit
0.1 ms
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
csp
hm
Vc
Filter switching
dwell time
*1
Speed [mm/s]
Pre-filter position
command
Post-filter position
command
Position Command FIR
Filter Time Constant [ms]
3818 hex × 0.1 ms
 Loading...
Loading...
