12 - 17
12 Troubleshooting and Maintenance
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
12-4 Troubleshooting
12
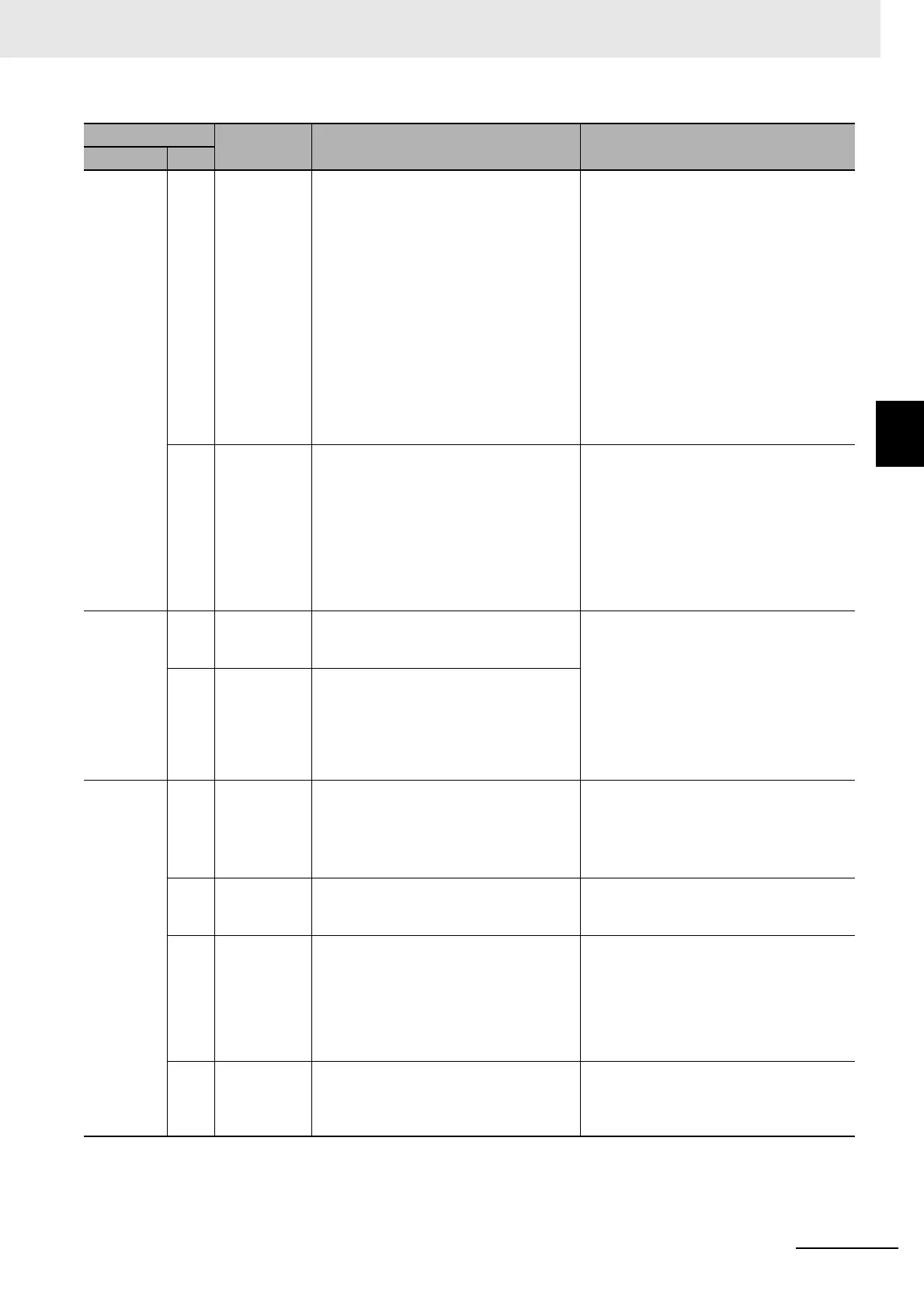
12-4-1 Troubleshooting with Error Displays
24 hex 0 hex Following
Error Counter
Overflow
Position error pulses exceeded the
setting of the Following error window
(6065 hex).
• Motor operation does not follow the
command.
• Check to see if the Motor operates
according to the position command.
Check on the force monitor to see if the
output force is not saturated. Adjust the
gain. Maximize the Force Limit setting
being used. Wire the external encoder
as shown in the wiring diagram.
Lengthen the acceleration and
deceleration times. Reduce the load and
the speed.
• The value of the Following error
window (6065 hex) is small.
• Increase the set value of object
6065 hex.
1 hex Excessive
Speed
Deviation
Error
The difference (speed deviation) between
Motor Velocity Demand Value After
Filtering and actual speed has exceeded
the set value of the Excessive Speed
Deviation Setting (3602 hex).
*5
• Increase the value set in the Excessive
Speed Deviation Setting (3602 hex).
• Lengthen the acceleration time of the
Motor Velocity Demand Value After
Filtering. Alternatively, improve the
tracking (following) performance by
adjusting the gain.
• Disable the Excessive Speed Deviation
Setting (3602 hex).
26 hex 0 hex Overspeed The motor speed exceeded the value set
in the Overspeed Detection Level Setting
(3910 hex).
• Do not give excessive speed
commands.
• Check the input frequency, dividing ratio,
and multiplication ratio of the position
command.
• If overshooting occurred due to faulty
gain adjustment, adjust the gain.
• Wire the external encoder correctly as
shown in the wiring diagram.
1 hex Overspeed 2 The motor speed exceeded the value set
on Overspeed Detection Level Setting at
Immediate Stop (3615 hex).
27 hex 4 hex Command
Error
The position command variation after the
electronic gear is higher than the
specified value.
• Check to see if the position command
variation is large.
• Check the electronic gear ratio.
• Check to see if the backlash
compensation amount is too large.
5 hex Command
Generation
Error
During position command processing, an
error such as an “over the calculation
range” error occurred.
Check to see if the electronic gear ratio,
and the acceleration and deceleration
rates meet the restrictions.
6 hex Operation
Command
Duplicated
An attempt was made to establish
EtherCAT communications (change from
Init to Pre-Operational state) or to turn
ON the servo from the controller (enable
operation) while executing an FFT that
operates with the Servo Drive alone or a
trial run.
Check to see if EtherCAT communications
is established or the servo is turned ON
(enable operation) while an FFT or a trial
run was being conducted.
7 hex Position Data
Initialized
*6
A Config operation was performed during
EtherCAT communications.
Check to see if Config operation was
performed was cleared for the absolute
encoder during EtherCAT
communications.
Error No.
Name Cause Measures
Main Sub
 Loading...
Loading...
