12 - 29
12 Troubleshooting and Maintenance
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
12-4 Troubleshooting
12
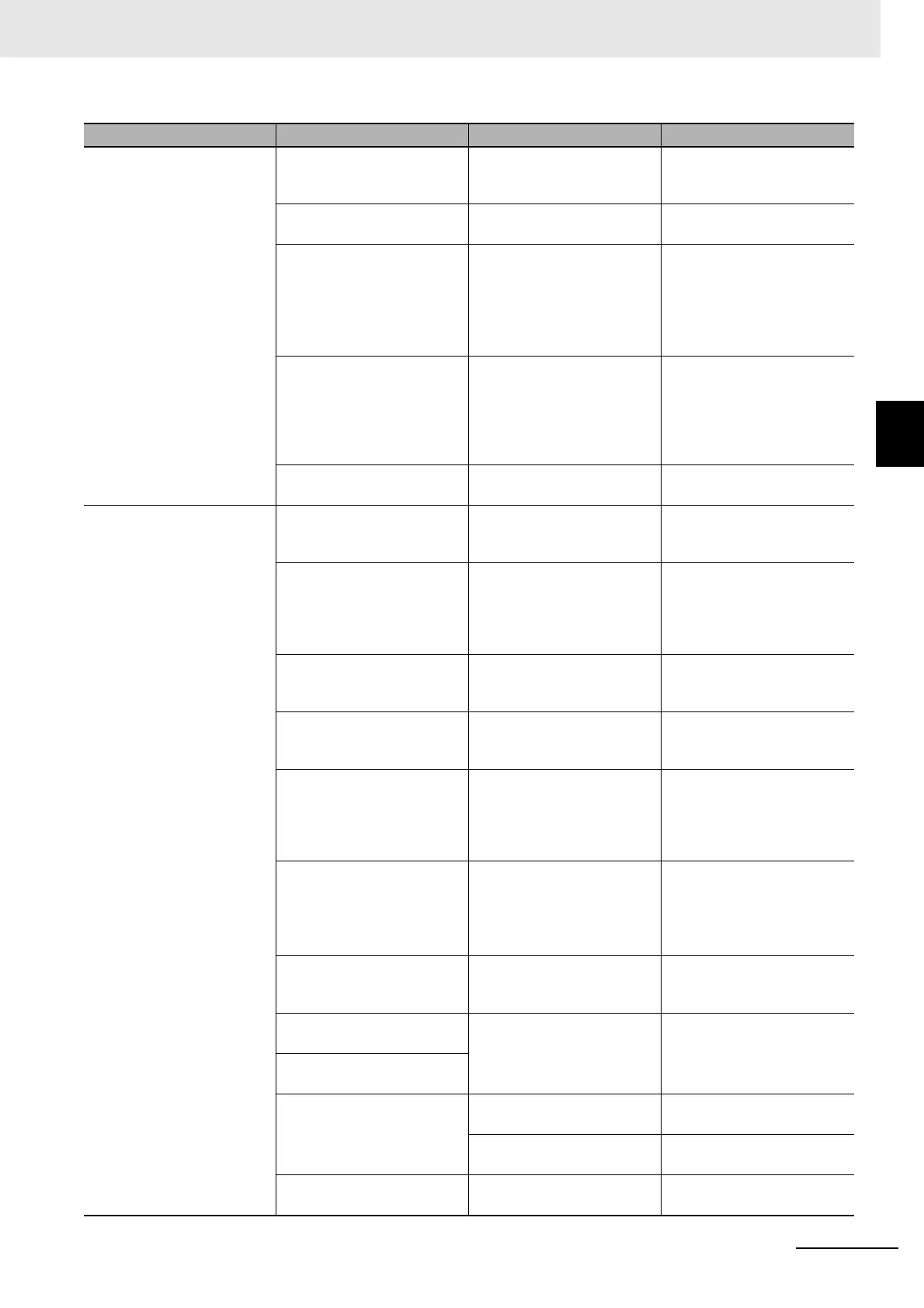
12-4-3 Troubleshooting Using the Operation State
The servo does not lock. The power cable is not
connected correctly.
Check to see if the motor
power cable is connected
properly.
Wire the motor power cable
correctly.
The motor power supply is
not ON.
Check the main circuit wiring
and power voltage.
Input the correct power and
voltage for the main circuit.
The Positive or Negative
Drive Prohibition Input (POT
or NOT) is OFF.
• Check to see if the input for
Positive or Negative Drive
Prohibition Input (POT or
NOT) is OFF.
• Check the input of +24 VIN
to CN1.
Turn ON POT and NOT. Input
+24 VIN to CN1.
The force limit is set to “0.” Check to see if the force
limits in the Positive torque
limit value (60E0 hex) and
the Negative torque limit
value (60E1 hex) are set to
“0.”
Set the maximum force to be
used for each of these
objects.
The Servo Drive has broken
down.
– Replace the Servo Drive.
The servo locks but the
motor does not operate.
The host controller does not
give a command.
For a position command,
check to see if the speed and
position are set to “0.”
Enter position and speed
data. Start the motor.
The Servo Drive received a
command but it is not
accepted.
Check to see if the Servo
Drive retains the object value
for two communications
cycles or more in Profile
position mode (pp).
Set the Servo Drive so that it
retains the object value for
two communications cycles
or more.
It is hard to determine if the
motor runs.
Check to see it the speed
command given by the host
controller is too small.
Check the speed command
from the host controller.
The brake is operating. Check the brake interlock
output (BKIR) signal and the
+24 VDC power supply.
Check to see if the brake is
released.
The force limits set in the
Positive torque limit value
(60E0 hex) and the Negative
torque limit value (60E1 hex)
are too small.
Check to see if the force
limits in objects 60E0 hex
and 60E1 hex are set to a
value close to “0.”
Set the maximum force to be
used for each of these
objects.
The Positive or Negative
Drive Prohibition Input (POT
or NOT) is OFF.
Check the ON/OFF state of
the POT and NOT signals
from the CX-Drive.
• Turn ON the POT and NOT
signals.
• Disable them in the
settings when the POT and
NOT signals are not used.
The control mode does not
conform to the command.
Check the set value of the
Control Mode Selection
(3001 hex).
Set the control mode
according to the command.
The motor power cable is
wired incorrectly.
Check the wiring. Wire correctly.
T
he external encoder cable
is wired incorrectly.
Power is not supplied. Check the power supply and
the 7-segment display.
Turn ON the power.
Check the voltage between
the power terminals.
Wire the power-ON circuit
correctly.
The Servo Drive has broken
down.
– Replace the Servo Drive.
Symptom Probable cause Items to check Measures
 Loading...
Loading...
