A - 11
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
A-1 CiA402 Drive Profile
A
A-1-5 Changing the Mode of Operation
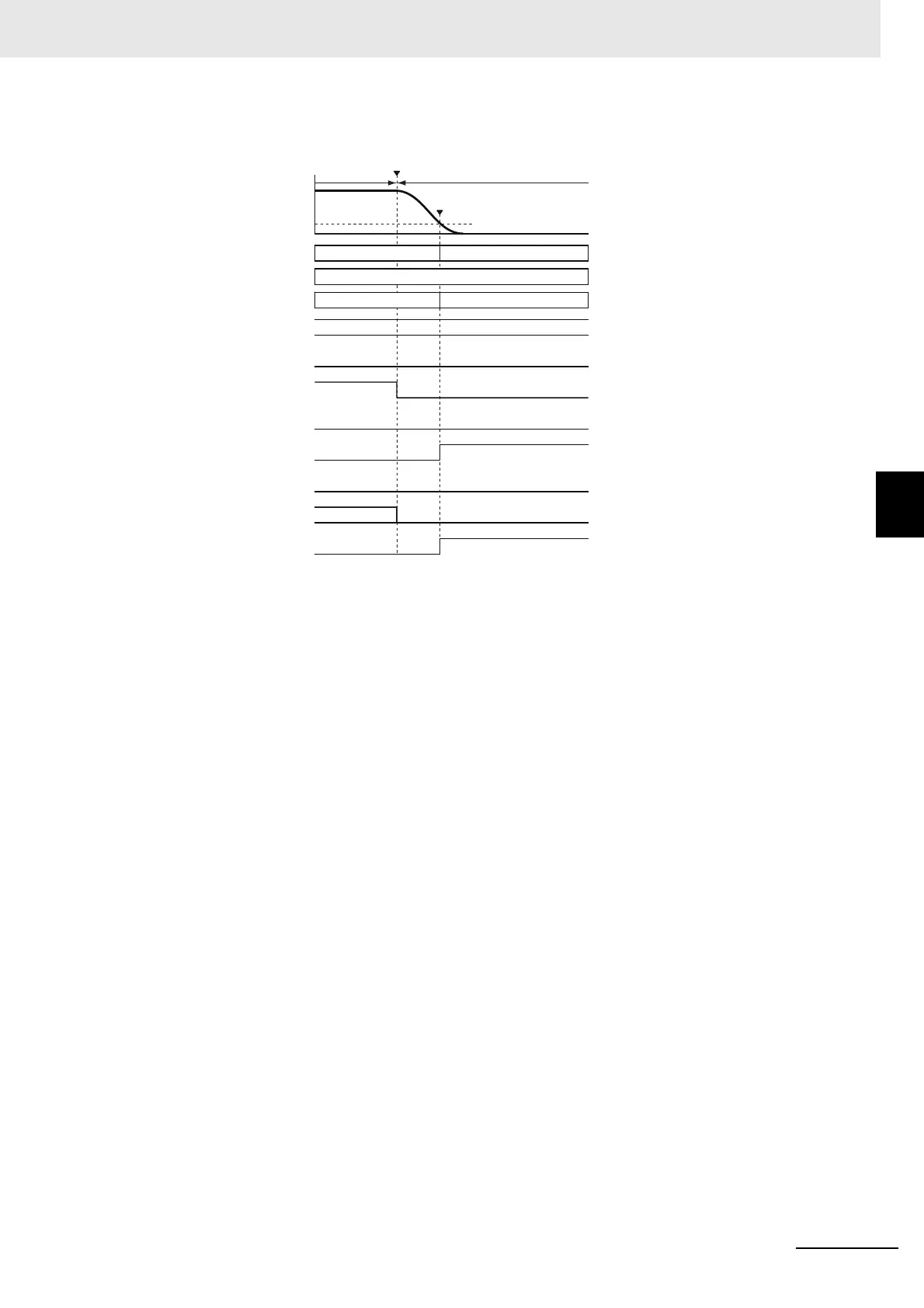
z (b) Example of Servo OFF during Operation in csv
*1 When the servo is turned OFF, a deceleration stop starts and 6061 hex continues to show the same mode as
the mode of operation (csv) specified in 6060 hex.
*2 After the motor stops, No mode assigned is shown by 6061 hex.
*3 Bit 12 will be “0” during a deceleration due to servo OFF.
*4 The mode shown in 6061 hex is forced to “0” because the mode shown in 6061 hex is different from the mode
of operation.
Note The operation during the interval from A to B for drive prohibition and main circuit power OFF is the same as
when the servo is turned OFF.
6061 hex
30 mm/s
csv
Operation enabled Switched on
No mode assigned
0
0
6060 hex csv
(VCMP)
(NEAR)
1
01
0
(Target position ignored)
10
0
1
0
*3
*1
0
(VLIM)
(DEN)
(Following error)
(Target reached)
A
*2
B
(Remote)
00
*4
0
*4
0
*4
0
*4
0/1
6041 hex: Bit 10
6041 hex: Bit 12
6041 hex: Bit 13
4000 hex: Bit 1
4000 hex: Bit 4
4000 hex: Bit 7
4000 hex: Bit 8
Actual speed
Servo ON Servo OFF
PDS state
6041 hex: Bit 9
 Loading...
Loading...
