Appendices
A - 62
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
*1 “Decelerating” means that after the start of deceleration, the time during which the motor runs at 30 mm/s or
higher.
Once the motor speed reaches 30 mm/s or lower and the status changes to “After stopping”, subsequently the
operation after stopping is performed regardless of the motor speed.
*2 Operation A/B is determined for each error number. For details on errors, refer to 12-3 Errors on page 12-9. To
have the Servo Drive perform the same operation independent of the error number, set this object to 0 to –3.
*3 For the immediate stop function, refer to 12-3-2 Immediate Stop Operation at Errors on page 12-11.
*4 When the error is cleared, a process which makes the Position demand value follow the Position actual value
comes into effect. To operate in cyclic sync mode (csp) after the servo turns ON, reset the command
coordinates in the host controller and then execute the operation. The motor may move suddenly.
Precautions for Correct UsePrecautions for Correct Use
Position control is forced into operation during deceleration and after the motor has stopped
(during an error or when the servo is OFF). The internal position command generation process is
also forced to stop.
• This object sets the operation mode.
• The default value is “0” (Not specified). Set the operation mode from the master after the power
supply is turned ON.
• A Command Warning (Error No. B1 hex) occurs if the servo is turned ON (Operation enabled = 1)
with the default setting of “0” (Not specified).
• Even when the default value (0: Not specified) is set again after changing the mode of operation, the
mode of operation does not return to “Not specified.” The previous mode of operation is retained.
• Similarly, when an unsupported mode of operation is set, the previous mode is retained.
• When an unsupported mode of operation is set using SDO mailbox communications, an ABORT
code is returned.
Explanation of Settings
For details about changing the modes of operation, refer to A-1-5 Changing the Mode of Operation on
page A-7.
• This object gives the present operation mode.
• The value definitions are the same as for the Modes of operation (6060 hex).
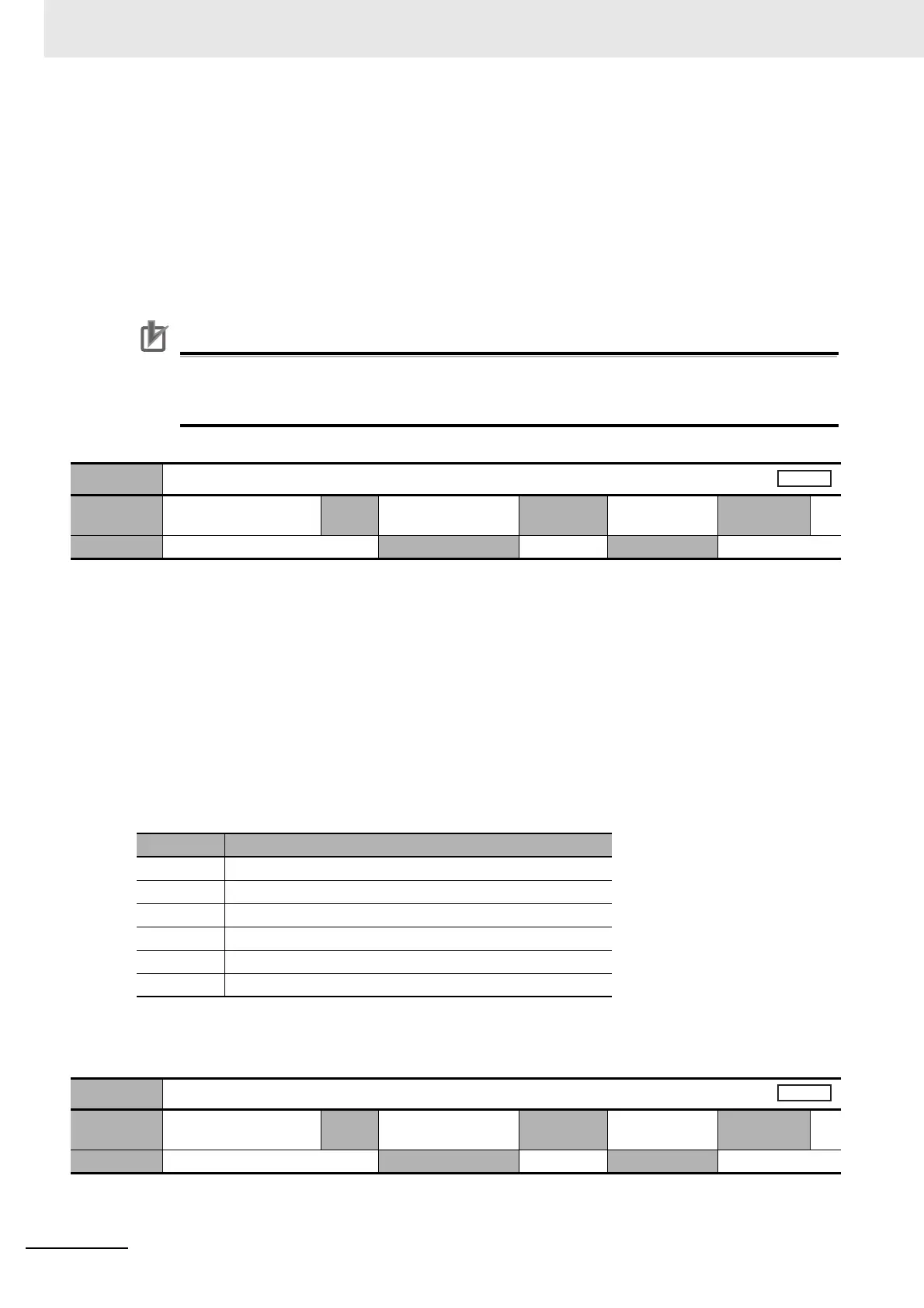
6060 hex
Modes of operation
Setting
range
0 to 10
Unit
–
Default
setting
0 Data
attribute
A
Size 1 byte (INT8) Access RW PDO map Possible
Set value Description
0 Not specified
1 Profile position mode (pp)
6 Homing mode (hm)
8 Cyclic synchronous position mode (csp)
9 Cyclic synchronous velocity mode (csv)
10 Cyclic synchronous torque mode (cst)
6061 hex
Modes of operation display
Setting
range
0 to 10
Unit
–
Default
setting
0 Data
attribute
–
Size 1 byte (INT8) Access RO PDO map Possible
 Loading...
Loading...
