หากต้องการรายละเอียดเพิ่มเติม โปรดดูบท 'การใช้หุ่นยนต์ของคุณ' ในส่วน 'โหมดทำความสะอาด'
วิธีการที่หุ่นยนต์หลีกเลี่ยงความต่างกันของความสูง
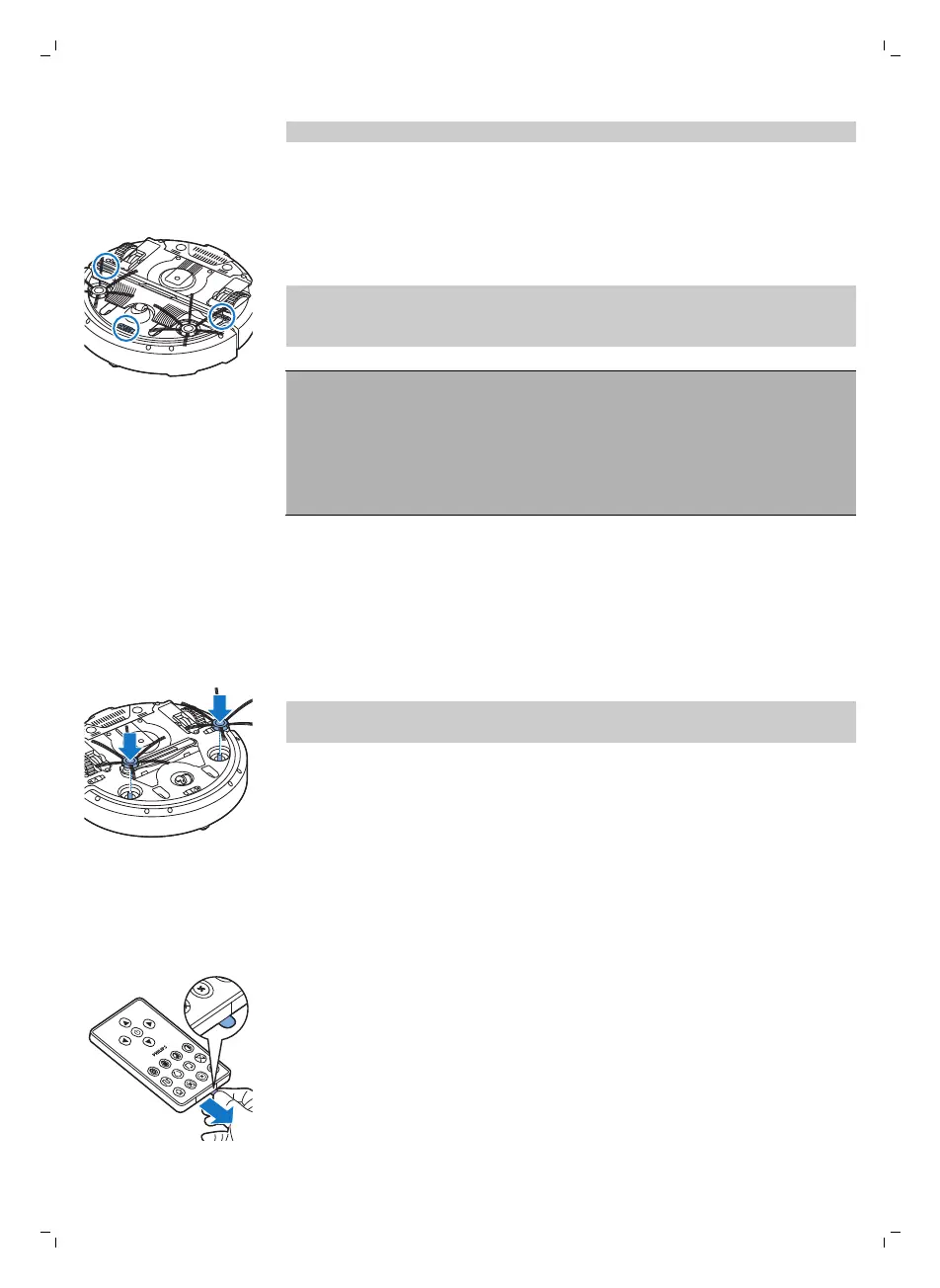
หุ่นยนต์มีเซนเซอร์ตรวจจับการร่วงหล่นสามอันติดตั้งอยู่ที่ด้านล่าง
หุ่นยนต์จะใช้เซนเซอร์ตรวจจับการร่วงหล่นทั้งสามเหล่านี้เพื่อตรวจหาและหลีกเลี่ยงพื้นที่ที่มีความสูงต่-
างระดับ เช่น บันได
หมายเหตุ:
เป็นเรื่องปกติสำหรับหุ่นยนต์ที่จะเคลื่อนที่เล็กน้อยเลยออกไปจากขอบซึ่งมีพื้นผิวที่มีความสูงต่างกัน
เนื่องจากเซนเซอร์ตรวจจับการร่วงหล่นนั้นอยู่ถัดจากกันชนเข้ามาเล็กน้อย
ข้อควรระวัง: ในบางกรณี
เซนเซอร์ตรวจจับการร่วงหล่นอาจตรวจไม่พบบันไดหรือพื้นที่ที่มีความสูงต่างระดับได้ทันเว
ลา ดังนั้น จึงควรตรวจสอบหุ่นยนต์อย่างรอบคอบในช่วงสองสามครั้งแรกที่คุณใช้งาน
และในเวลาที่หุ่นยนต์ทำงานในบริเวณใกล้กับบันไดหรือพื้นที่ที่มีความสูงต่างระดับ
ควรทำความสะอาดเซนเซอร์ตรวจจับการร่วงหล่นเป็นประจำเพื่อที่หุ่นยนต์จะยังคงตรวจจับ
พื้นที่ต่างระดับได้อย่างเหมาะสมและต่อเนื่อง (ดูคำแนะนำในบท
'การทำความสะอาดและบำรุงรักษา')
ก่อนใช้งานครั้งแรก
การติดตั้งแปรงด้านข้าง
1 แกะกล่องแปรงด้านข้าง แล้ววางหุ่นยนต์บนโต๊ะหรือบนพื้นแบบหงายท้องขึ้น
2 กดแปรงด้านข้างลงไปบนแกนที่ด้านล่างของหุ่นยนต์
หมายเหตุ: ตรวจสอบว่าคุณติดตั้งแปรงด้านข้างอย่างถูกต้องแล้ว
กดแปรงลงไปบนแกนจนกระทั่งเข้าที่และมีเสียงดังคลิก
การนำแถบป้องกันออกจากรีโมทคอนโทรล
รีโมทคอนโทรลนี้ใช้งานแบตเตอรี่รูปเหรียญ CR2025
แบตเตอรี่นี้ได้รับการปกป้องด้วยแถบป้องกันที่ต้องนำออกก่อนใช้งาน
1 ดึงแถบป้องกันแบตเตอรี่ออกจากช่องใส่แบตเตอรี่ของรีโมทคอนโทรล
รีโมทคอนโทรลพร้อมใช้งานแล้ว
57
ภาษาไทย