自動吸塵機器人如何避開高度落差
自動吸塵機器人底部有三個掉落感測器。 它使用這些掉落感測器偵測及避開高度
落差,例如樓梯。
注意: 自動吸塵機器人移動時會稍微超過高度落差的邊緣,此屬正常現象,因為
其前方的掉落感測器位於緩衝墊後方。
注意事項: 有時,掉落感測器可能會偵測不到樓梯或其他高度落差。 因此,在前
幾次使用以及在靠近樓梯或其他有高度落差的地點使用時,請謹慎監視自動吸塵機
器人。 請務必定期清潔掉落感測器,以確保自動吸塵機器人可持續偵測高度落差
(相關說明請參閱「清潔與維護」單元)。
第一次使用前
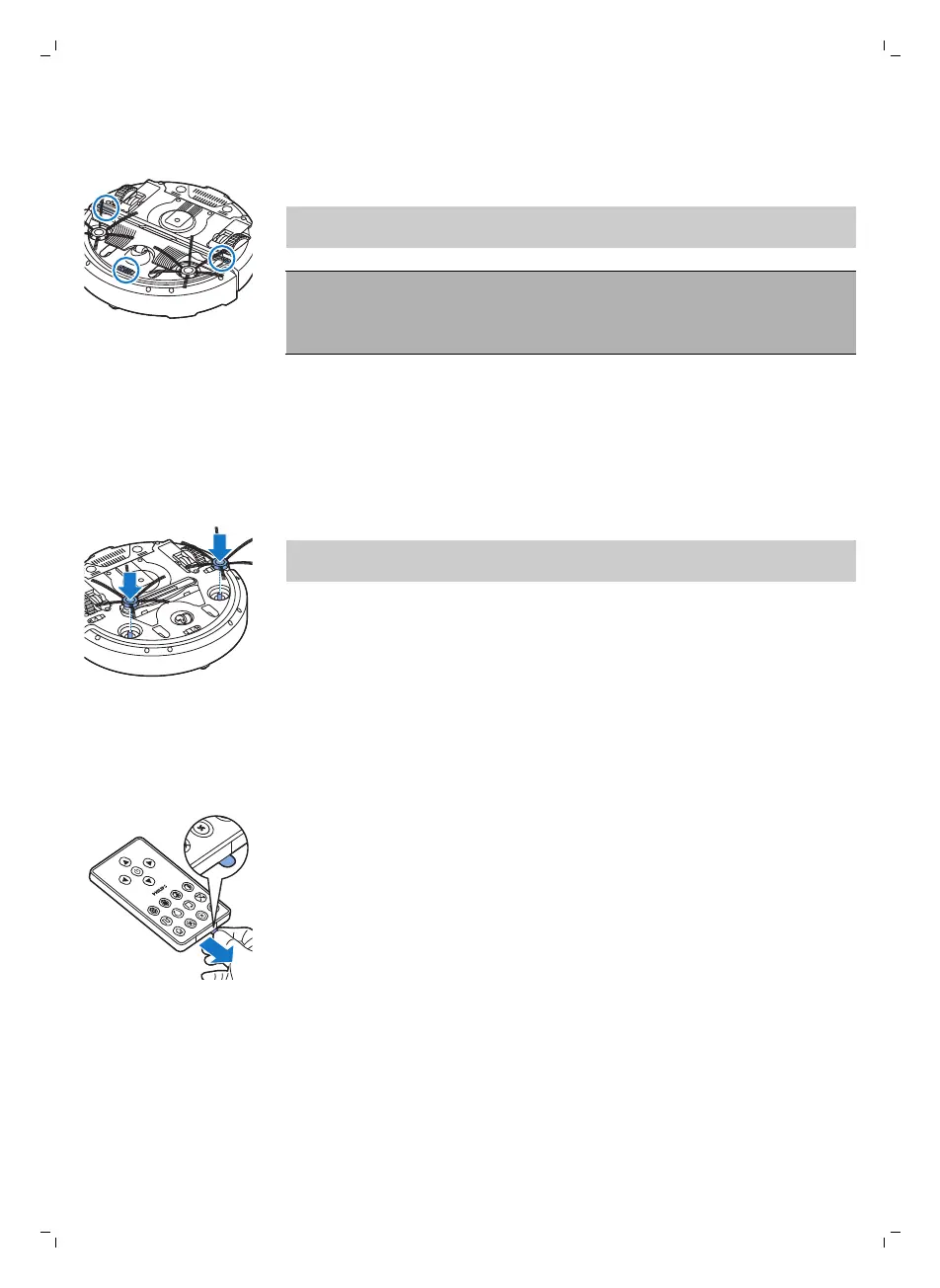
安裝側邊刷毛
1 拆開側邊刷毛包裝,將自動吸塵機器人上下顛倒放置在桌面或地板上。
2 將側邊刷毛推入自動吸塵機器人底部的驅動軸上。
注意: 請確定您正確安裝側邊刷毛。 將它們推到驅動軸上,直到聽到卡入定位
的聲音為止。
取出遙控器的拉片
遙控器使用 CR2025 硬幣形電池。 此電池受到保護拉片的保護,使用前請移除保
護拉片。
1 將電池保護拉片從遙控器的電池槽內拉出。 您現在可以開始使用遙控器。
79
繁體中文