28
Please revise the codes according to the actual performance of the robot.
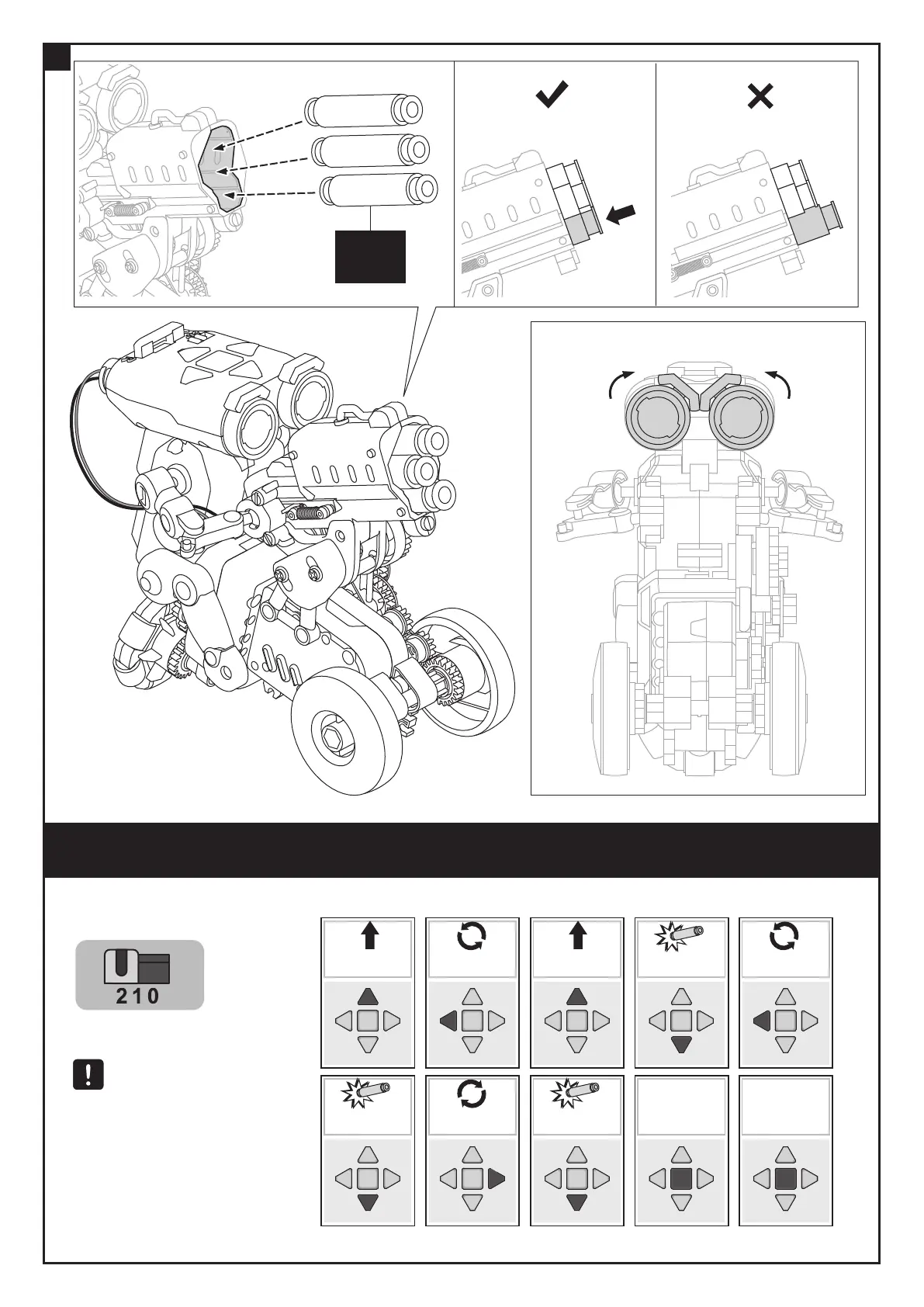
Below examples are just for references.
範例
Example
14
推
PUSH
切換至模式2
Switch to Mode 2
x4
完成
FINISH
出發
GO
x1 x1
x3
前進
Forward
x3
前進
Forward
x1x4
原地左轉
Left spin
原地左轉
Left spin
x1x1 x4
原地右轉
Right spin
射擊
Shoot
射擊
Shoot
射擊
Shoot
The robot will go one step forward after
finishing the program. It is built-in as a
default, to reset the mechanics to
shooting home position.
ABOUT SHOOTING HOME POSITION
轉動機器人眉毛以做出不同的表情
You could rotate the eyebrows to create different looks.
請依照實際狀況編程,以下範例僅供參考
射擊位置回歸
於每次程式執行後,機器人會向前一步,
此為內建預設值,目的是將狙擊槍射擊位
置回歸起始點
正確
Correct
錯誤
Incorrect
飛鏢
DART
MODULE