the heat output of the heater. If the heat output is
increased too much, it will get too hot. The person must
then reduce the heat output.
If the heat output is increased or reduced too quickly, then
the control loop starts to sway. The room temperature
fluctuates. It is either too hot or too cold. To prevent this,
the person must carefully and slowly reduce or increase
the heat output.
Loop error
The loop error is the difference between the command
variable and the process value. In other words: the
deviation of a process value from a set value.
e = SP – PV
The loop error ‘e’ brings about a change to the
manipulated variable M.
The example above illustrates this very well: if the desired
temperature is 20 °C (= command value w), the room
temperature is 22 °C (= process value PV), this results in
the loop error:
e = SP – PV = 20 °C - 22 °C = -2 °C
In this case, the negative sign indicates a reversing action:
the heat output is reduced.
In a control loop's state of equilibrium, the loop error is
zero or very small. If the command variable changes or
there is a disturbance, a loop error arises. The loop error
is corrected by means of the manipulated variable M.
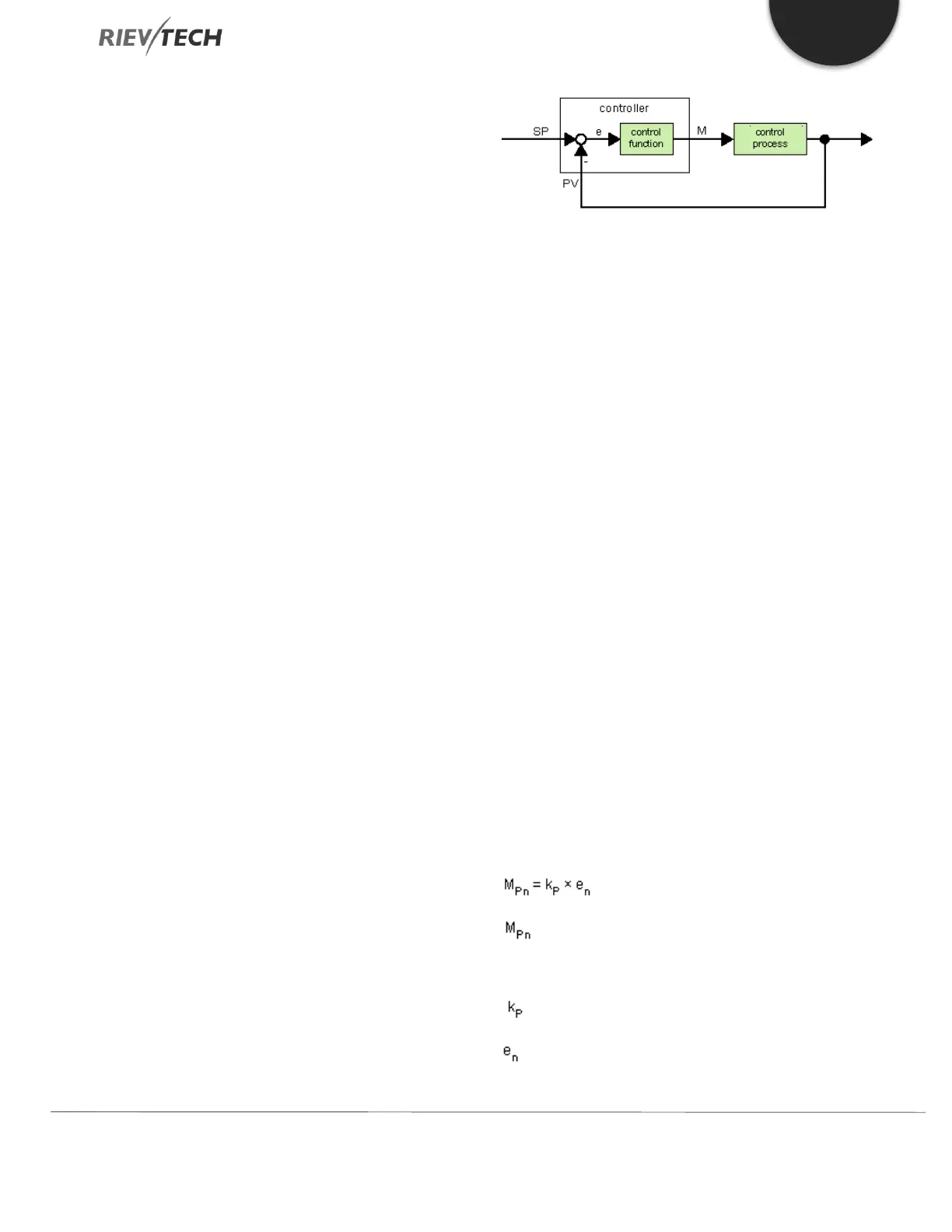
Controller basics
A controller can be simply portrayed as follows:
The comparing element and the controller function
describe the conduct of the controller.
The following describes the most important types of
controller. A controller's step response tells us a lot about
its conduct. The step response describes how a controller
reacts to the erratic change in the process value.
There are 3 important basic types of controller:
Proportional-action controller (P controller)
Integral-action controller (I controller)
Differential-action controller (D controller – we're not
touching on this here)
These are combined for a real controller. For instance, the
PI controller:
P Controller
A proportional-action controller (P controller) changes the
manipulated variable M proportional to the loop error. The
P controller works immediately. By itself, it cannot drive
the loop error to zero.
: Manipulated variable of the P controller at the time
n
: Gain of the P controller
: Loop error at the time n
 Loading...
Loading...


