The following picture shows a jump in process value and
step response of the controller:
Summary
The P controller has the following characteristics:
It cannot correct faults with the control process > lasting
loop error.
It reacts immediately to a change in the process value.
It is stable.
I Controller
An integral-action controller (I controller) changes the
manipulated variable M proportional to the loop error and
to the time. The I controller works by delayed action. It
completely remedies a loop error.
In order to calculate the value of the manipulated variable
at a period of time n, the time up until this period of time
must be divided into small time slices. The loop errors at
the end of each time slice must be added up (integrated)
and they are then entered in the calculation.
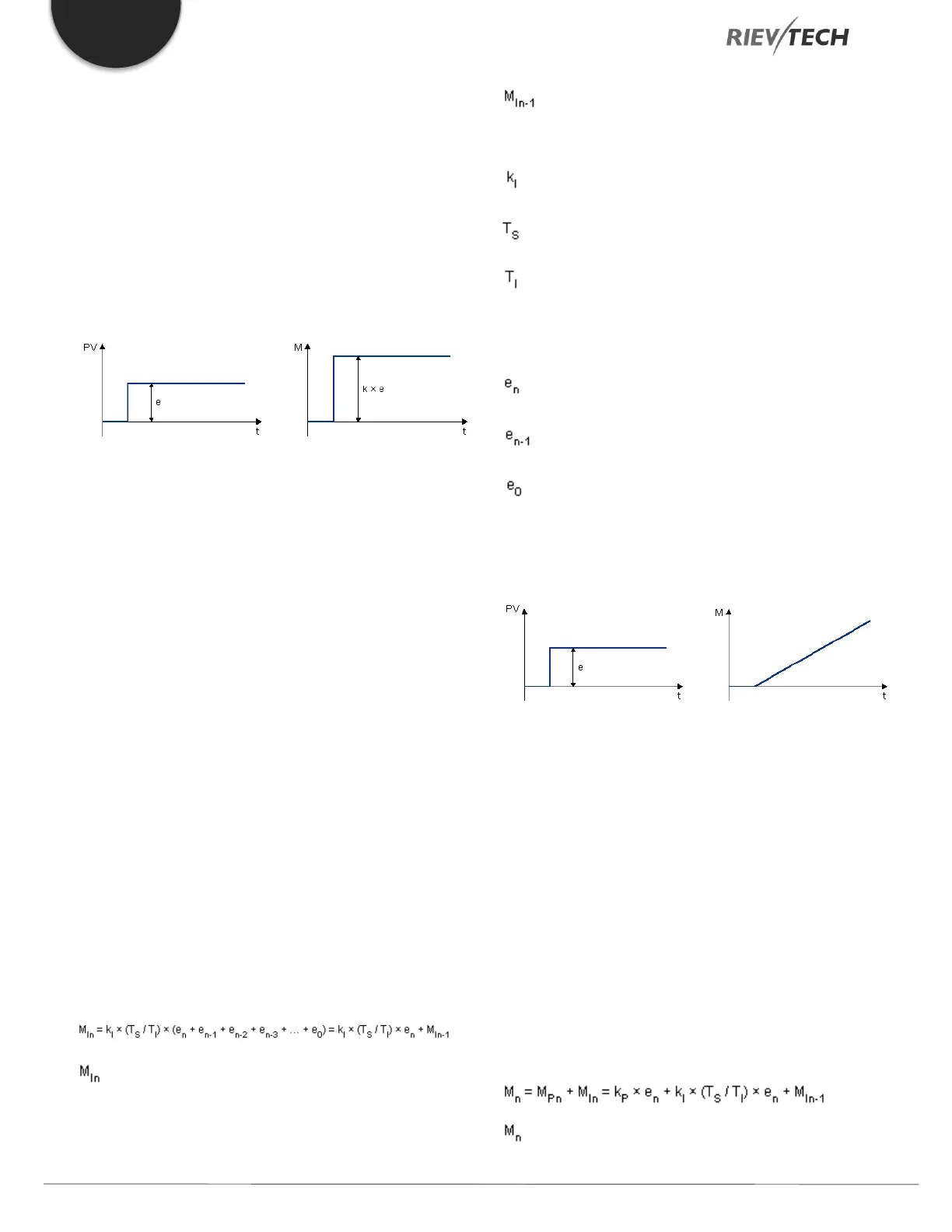
: Manipulated variable of the I controller at the time n
: Manipulated variable of the I controller at the time
n-1; also called the integral sum
: Gain of the I controller
: Sampling time, duration of a time slice
: Integral time: by means of this time, the influence of
the integral part is controlled by the manipulated variable,
also known as integral-action time
: Loop error at the time n
: Loop error at the time n-1; etc.
: Loop error at the beginning of the calculations
The following picture shows a jump in process value and
step response of the controller:
Summary
The PI controller has the following characteristics:
It sets the process value exactly to the command variable.
By so doing, it tends to oscillate and is unstable.
It requires more time to carry out the control action than
the P controller.
PI controller
A PI controller reduces the loop error immediately and will
eventually drive the loop error to zero.
: Manipulated variable at the time n
 Loading...
Loading...


