: Proportional part of the manipulated
variable
: Integral part of the manipulated variable
: Manipulated variable of the I controller
at the time n-1; also called the integral sum
: Gain of the P controller
: Gain of the I controller
: Sampling time, duration of a time slice
: Integral time; by means of this time the
influence of the integral part is controlled by
the manipulated variable, also known as the
integral-action time
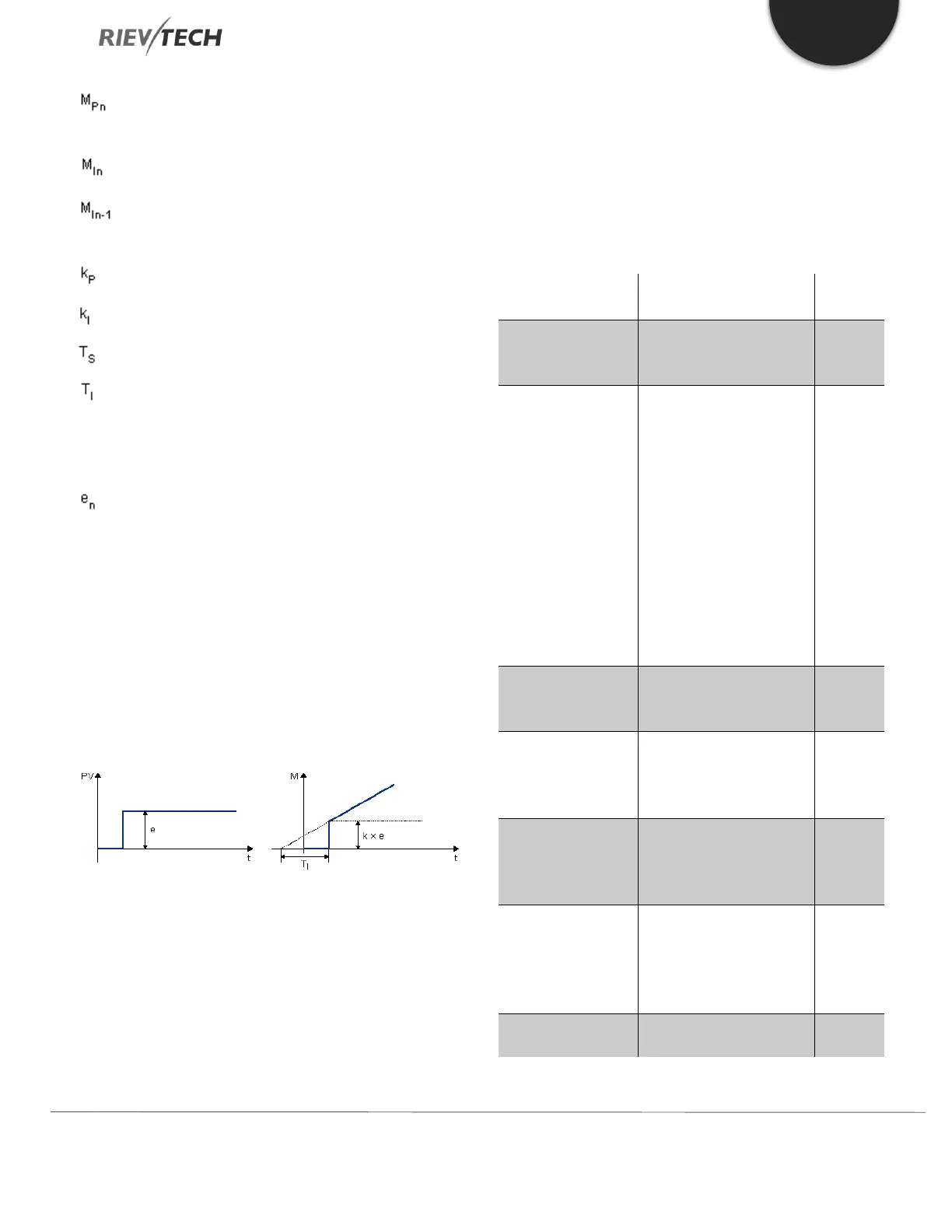
: Loop error at the time n
The following picture shows a jump in process value and
step response of the controller:
Summary
The PI controller has the following characteristics:
The P controller components quickly intercept an
occurring loop error.
The I controller components can then remedy the
remaining loop error.
The controller components supplement each other so
that the PI controller works quickly and precisely.
Description of the individual parameters
In the xLogic, the
parameter KC applies as an
increase for the I part and
the P part of the controller
equally.
Should you enter KC=0,
then the P part of the
controller switches off. In
this special case, k is
automatically set to 1 for
the I part. If KC = 0: kP = 0
and kI = 1
If KC <> 0: kP = kI = KC
The parameter SP is the
set-value assignment w. For
this parameter, you can use
the analogue output of a
different special function.
 Loading...
Loading...


