www.spiercetech.com
9
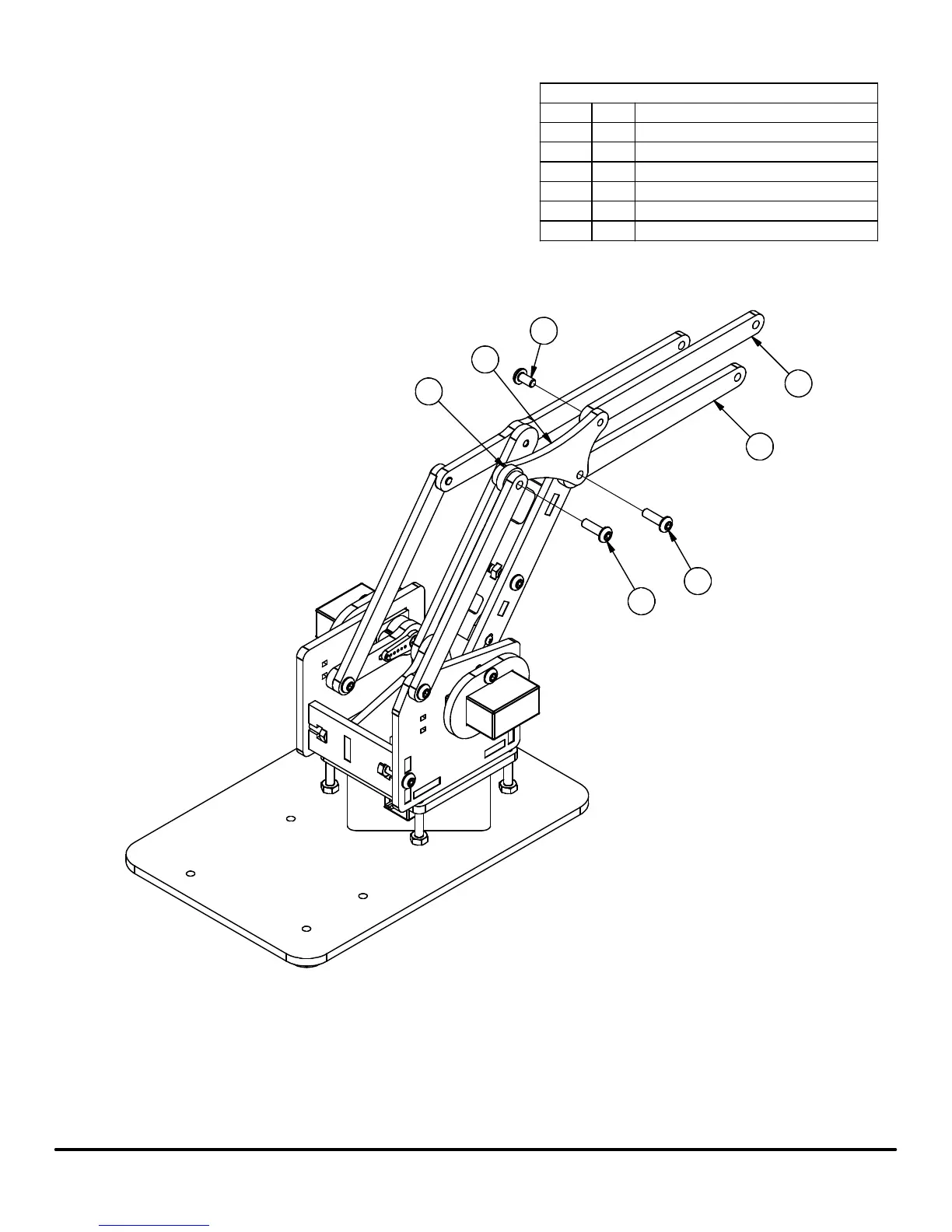
meArm Assembly Manual v0.4
PARTS LIST
PART NUMBER
QTY
ITEM
Parallel Linkage
11
M3 x 6mm Screw12
Parallel Linkage Connector
13
Right Wrist Joint
14
Spacer15
M3 x 10mm Screw26
6
6
2
4
1
3
5
Step 37: Attach (1) Parallel Linkage to the Parallel Linkage Connetor using (1) M3 x 6mm Screw
Step 38: Attach the Parallel Linkage Connector to the Right Wrist Joint and the Left Arm Base Joint using (1) M3 x 10mm Screw
Step 39: Attach the last hole of the Parallel Linkage Connector to the Parallel Linkage on the Right Arm Servo Plate using
(1) M3 x 10mm Screw. Make sure to place (1) Spacer between the Parallel Linkage Connector and the Parallel Linkage.