18
STEP
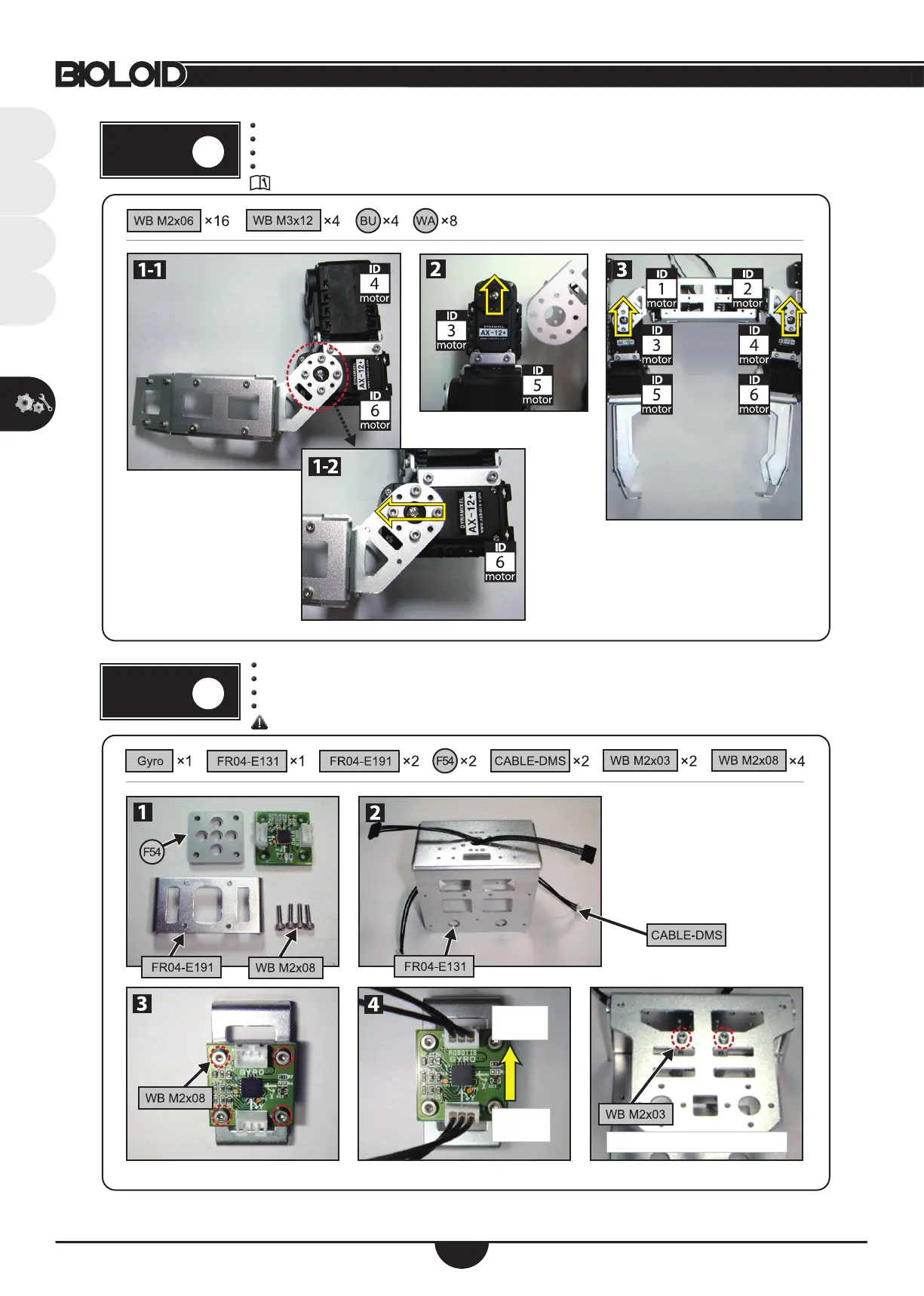
7
STEP
8
Robot
Frontside
Robot
Backside
Fasten front-sided 2 bolts only
팔 부분에 손을 체결하고, 몸통 프레임과 체결한다.
자이로센서와 브라켓(FR04-E191), 허리프레임(FR0-E131)을 체결한다.
Attach hand to arm, then attach to body frame.
Attach gyroscope board and FR04-E191 bracket to FR04-E131 back frame.
腕の部分に手を締結して、胴フレームと締結する。
ジャイロセンサーとブラケット(FR04-E191)、腰のフレーム(FR0-E131)を締結する。
조립 팁 1 참조
/ refer to tip 1/
組立ヒント1を参照
/
参考提示1
(p.14)
자이로센서의 조립방향에 주의
/ Be sure the gyro sensor has been assembled in correct directionen/
ジャイロセンサーの組み立て向きに注意
/
注意陀螺仪的组装方向
将机器人的手部连接到手臂上,然后将它们连接到身体连接件上。
将陀螺板和FR04-E109 连接件连接到腰部连接件(FR04-E131)上。
한국어
ENG
日本語
中文
18

 Loading...
Loading...