19
STEP
9
STEP
10
1
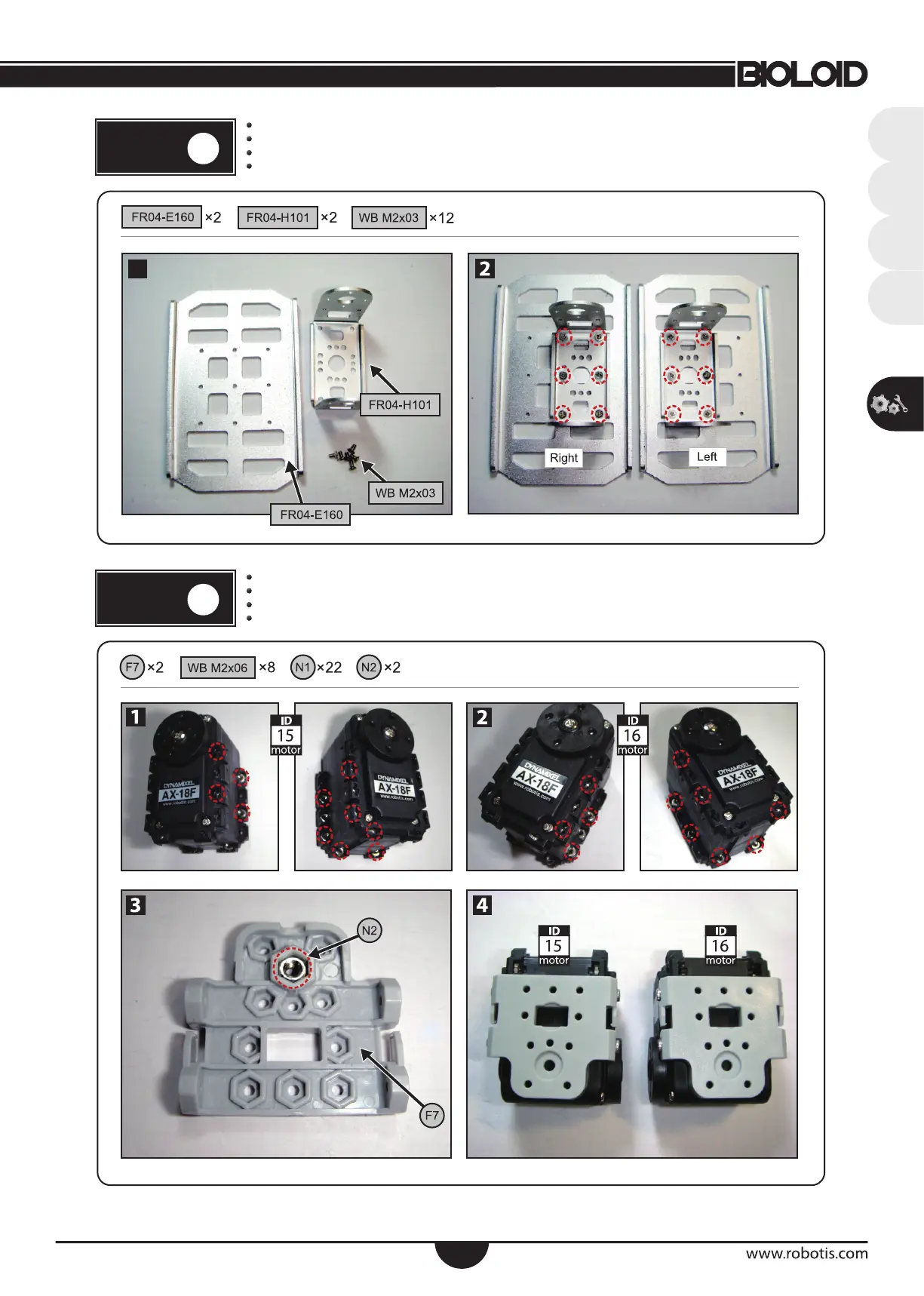
발바닥 프레임과 힌지 프레임(FR04-H101)을 체결한다.
AX-18A ID15와 ID16에 너트를 삽입하고, F7에 N2 너트를 삽입한 후, 다이나믹셀과 체결한다.
Attach foot frame and FR04-H101 frame together.
Insert nuts to ID15 and ID16 of AX-18A; insert N2 nuts to F7. Afterward attach F7 to DYNAMIXEL.
足の裏のフレームとヒンジのフレーム(FR04-H101)を締結する。
AX-18A ID15とID16にナットを挿入して、F7にN2ナットを挿入した後にダイナミクセルと締結する。
将脚部连接件和FR04-H101连接件相连。
将螺母插入到编号为ID15和ID16的AX-18A上,将N2螺母插入到F7。之后将F7插入到DYNAMIXEL。
한국어
ENG
日本語
中文

 Loading...
Loading...