3ºDLX¢SUT
/BDIMJOLT
/BDISFDIUT
;VSºDL[VN
"V珱BEFO
4UFVFSUEFO#FUSJFC
des Saugroboters
4UFVFSUEFO#FUSJFC
des Saugroboters
4UFVFSUEFO#FUSJFC
des Saugroboters
Steuert den Saugroboter
[VN"V珱BEFO[VSºDL[VS
-BEFTUBUJPO
*N"SCFJUTNPEVT%SºDLFO
4JFEJF5BTUFVOEMBTTFO
4JFTJFMPTVNEFO3PCPUFS
VN睡睟nOBDIMJOLT[V
ESFIFO)BMUFO4JFEJFTF
5BTUFHFESºDLUVNEFO
3PCPUFS睠睧睟nOBDIMJOLT
und dann vorwärts zu
fahren.
*N"SCFJUTNPEVT%SºDLFO
4JFEJF5BTUFVOEMBTTFO
4JFTJFMPTVNEFO3PCPUFS
VN睡睟nOBDIMJOLT[V
ESFIFO)BMUFO4JFEJFTF
5BTUFHFESºDLUVNEFO
3PCPUFSLPOUJOVJFSMJDI
nach links zu drehen.
*N"SCFJUTNPEVT%SºDLFO
4JFEJF5BTUFVOEMBTTFO
4JFTJFMPTVNEFO3PCPUFS
VN睡睟nOBDISFDIUT[V
ESFIFO)BMUFO4JFEJFTF
5BTUFHFESºDLUVNEFO
3PCPUFSLPOUJOVJFSMJDI
nach rechts zu drehen.
%FS4BVHSPCPUFSLFISU
[VN"V珱BEFOJOEJF
-BEFTUBUJPO[VSºDL
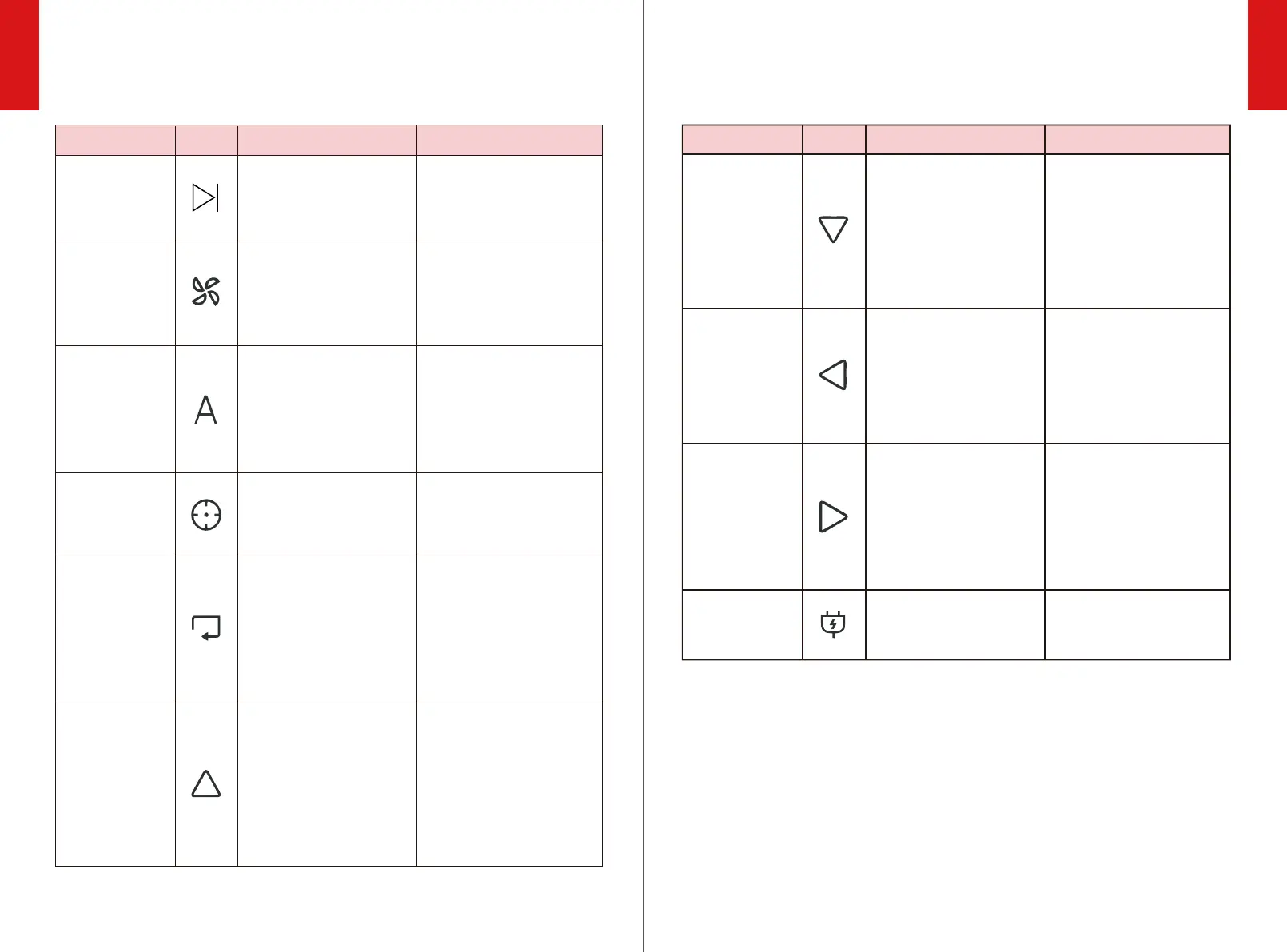
5BTUF 4ZNCPM Funktion #FTDISFJCVOH
4UBSU1BVTF
Einstellung der
Absaugung
Automatische
3FJOJHVOH
4QPU3FJOJHVOH
,BOUFOSFJOJHVOH
Vorwärts
Steuert den Start und die
1BVTFEFT3PCPUFST
*OEJFTFN.PEVTGºISU3睠
eine zeitgesteuerte
3FJOJHVOHEVSDI3FJOJHVOH
HFN¢EFN[VHFXJFTFOFO
1GBE
3睠SFEV[JFSUTFJOF(FTDIXJO-
digkeit und bewegt sich an
der Wand entlang, wenn er
eine Wand erkennt, um eine
HSºOEMJDIF3FJOJHVOHEFS
,BOUF[VHFX¢ISMFJTUFO
*N"SCFJUTNPEVT%SºDLFO
4JFEJF5BTUFVOEMBTTFO4JF
TJFMPTVNEFO3PCPUFSFUXB
睠睟DNWPSX¢SUT[VGBISFO
)BMUFO4JFEJFTF5BTUF
HFESºDLUVNEFO3PCPUFS
kontinuierlich vorwärts zu
fahren.
3睠SFJOJHUFJOFOCFTUJNNUFO
#FSFJDIJOUFOTJWJOFJOFN
spiralförmigen Muster.
Stellt die Saugkraft ein
4UBOEBSE.JUUFM.BYJNVN
4UBSU1BVTF
Einstellung der Absaugung
3FJOJHVOHJN"VUP.PEVT
3FJOJHVOHJN4QPU.PEVT
3FJOJHVOHJN,BOUFONPEVT
4UFVFSUEFO#FUSJFCEFT
Saugroboters
5BTUF 4ZNCPM Funktion #FTDISFJCVOH
Anweisungen zur Fernbedienung
Deutsch
Deutsch
 Loading...
Loading...