Strasbaugh Operator Functions
Version 4.0 - February 1998 3 - 27
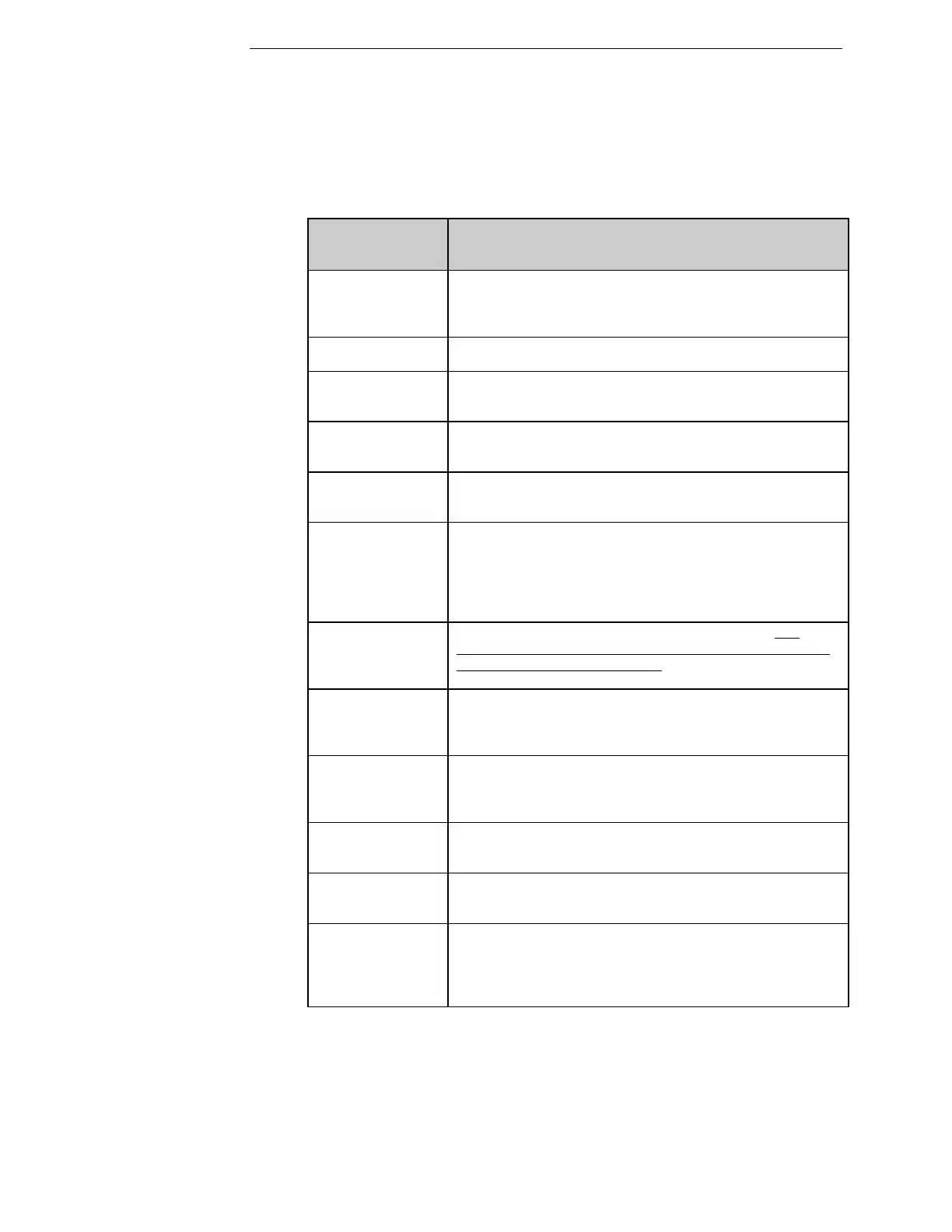
Function Key Choices Available at the Home Machine Menu
Key Label Function(s)
ALL
"ALL" causes all axes to be homed. The axes will be homed in a
particular sequence. As each axis is completed, its status will
change from Not Referenced to Referenced.
Bridge
"Bridge" will cause the bridge to be homed.
Left
Send
"Left Send" will cause the left send elevator to be homed.
Right
Send
"Right Send" will cause the right send elevator to be homed.
Left
Recv
"Left Recv" will cause the left receive elevator to be homed.
Right
Recv
or
Scrub
Sta.
"Right Recv" will cause the right receive elevator to be homed.
"Scrubber Station" will cause the optional scrubber station to be
homed.
Robot
Travel
"Robot Travel" will cause the linear robot to be homed. This
should not be selected unless the robot arms have been homed and
are seen to be at their zero positions.
Robot
Arm
"Robot Arm" will cause both the arm and rotation of the wafer
handling robot to be homed. (The two arm type robot will show
"Robot TopArm", and only that arm will be homed.)
Robot
Rotate
"Robot Rotate" will cause both the arm and rotation of the wafer
handling robot to be homed. (The two arm type robot will show
"Robot BotArm", and only that arm will be homed.)
Robot
Up/Dn
"Robot Up/Dn" will cause the Z axis of the wafer handling robot to
be homed.
Cond
Arm
"Conditioning Arm" (programmable arm only) will cause the arm to
lift (supply air must be on) and then be homed.
Jog
Arm
"Jog Arm" (programmable arm only) will cause the arm to move a
short distance toward the front of the machine without lifting. This
choice should only be used to move the arm if it is interfering with
the front of the bridge.
 Loading...
Loading...