F
20
PROGRAMMATION AUTOMATIQUE (simplifiée)
Procédure :
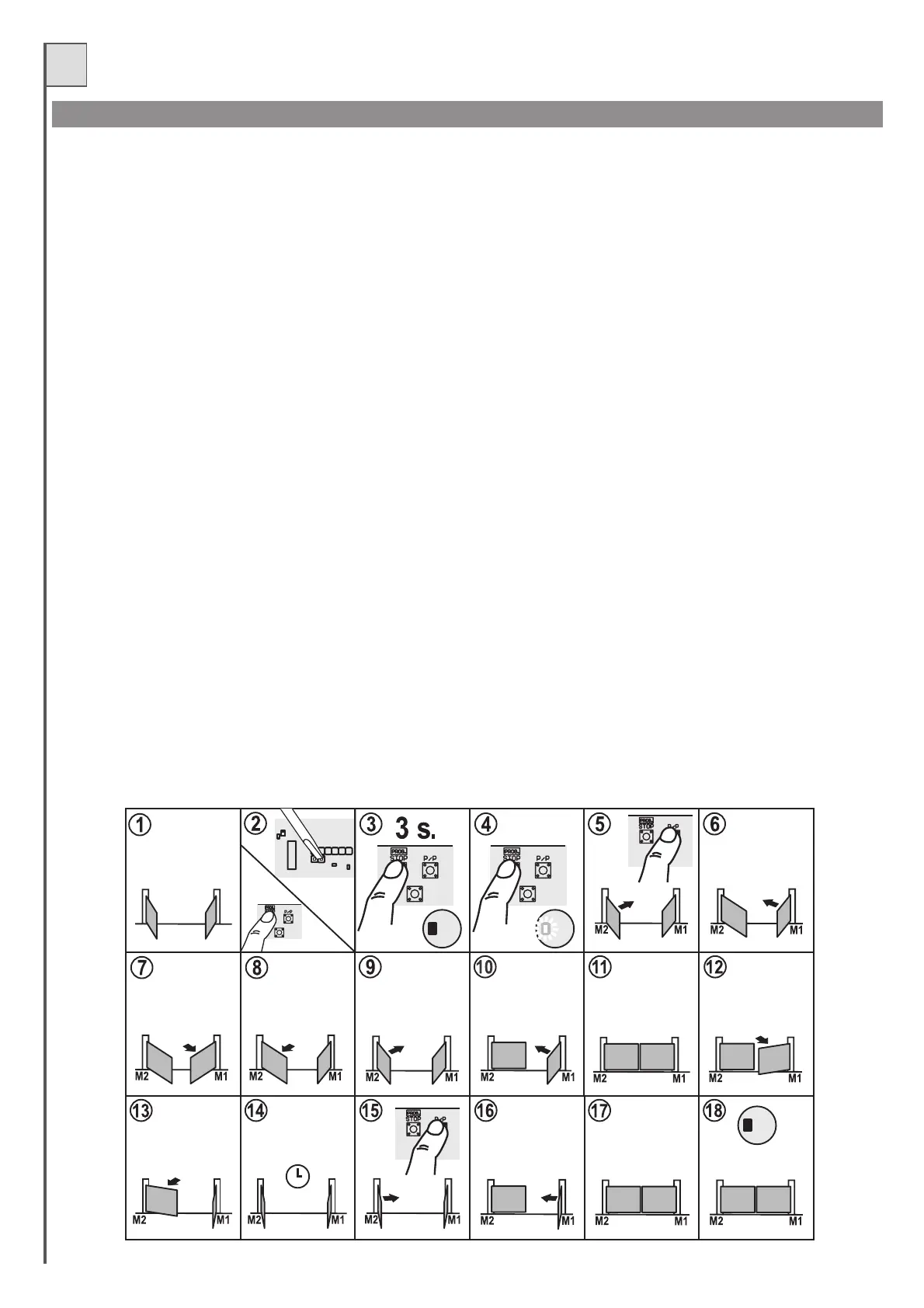
1- Positionner les vantaux (ou le vantail) en position de portail presque ouvert : les vantaux doivent avoir de la place pour bouger pendant environ 5
secondes en fermeture. Si les vantaux ne sont pas en position on peut utiliser laprocédure décrite au paragraphe précédent.
2- En maintenant la touche Prog enfoncée, effectueruneréinitialisation en court-circuitant avec untournevis le cavalierReset (pos. 20 fig. 1).
3- Maintenir la touche Prog enfoncée.
4-Au bout detrois secondes, laled LD3 (etle clignotant) s'allume. La procédure de programmationest activée.
5- Presser la touche P/Ppour lancer l'auto-apprentissage. Le vantail M2 part en fermeture pendant 3-5 sec (environ) puis s'arrête
6- Le vantail M1 exécute juste après le mêmemouvement.
7- Le vantail M1 part en ouverture pendant 3-5s puis s'arrête.
8- Juste après, le vantail 2 effectuele même mouvement (3-5 s d'ouverture puis arrêt).
9- Le vantail avec M2 ferme complètement
10- Le vantail avec M1 ferme lui aussi
11-12- Quand les deux vantaux sont fermés, M1 partautomatiquement en ouverture.
13- Quand M1 est ouvert M2 ouvre complètement luiaussi.
14- Quand les deux vantaux sont en position d'ouverturela mémorisation du temps de pause démarre.
15- Quand le temps de pause désiré s'est écoulé,presser la touche P/P, lemoteur M2 parten fermeture.
16- Quand M2 arrive en butée, M1 ferme.
17- Portail complètement fermé
18- Fin de la programmation (la logique de commandese prépare automatiquement au fonctionnement normal).
IMPORTANT: dans ce mouvement, les vantaux ne doivent pas aller contre la butée, si cela se produit, répéter l'auto-apprentissage (en
positionnantles vantaux de manière qu'ils parviennent à fermer pendant 5 secondes sans rencontrer la butée).
IMPORTANT: durant ce mouvement non plus les vantaux ne doivent pas finir contre la butée, si cela se produit, les positionner correctement
et répéter l'auto-apprentissage. À ce point la logique de commande a détecté tous les paramètres des deux vantaux (présence-absence
encodeuret sa vitesse, courant sur les moteurs).
- La logique de commande détecte au cours de cette manœuvre la présence des encodeurs sur les moteurs : IL N'EST PASADMIS d'avoir un
moteur avec l'encodeur et l'autre sans, si cela se produit (par exemple à cause d'une panne sur l'encodeur d'un des moteurs) la logique de
commandeémet un signal d'erreur constitué de dix clignotements sur led LD3 et voyant.
- La détection correcte de la présence des encodeurs peut être contrôlée en regardant les leds du fonctionnement moteurs (pos. 9 et 21
Fig. 1), si la led correspondant au moteur en mouvement clignote, l'encodeur correspondant a été détecté.
Sila led reste allumée fixe, l'encodeur n'a pas été détectée.
- Si la logique de commande ne voit pas l'encodeur sur les deux moteurs la détection de l'obstacle sera effectuée en contrôlant le courant au
coursdu fonctionnement.
-Les valeurs mémorisées restent en mémoire jusqu'à la prochaine programmation.
- Cette procédure simplifiée de programmation configure automatiquement les valeurs des retards des vantaux et des points de
ralentissementen utilisant des valeurs par défaut.
- Si ces paramètres se révèlent inadaptés à l'installation en objet, il faudra procéder avec la programmation avancée décrite au paragraphe
quisuit.
P3
P3 P3
LD3 LD3
Reset
P3
P3
LD3
Temps
PAUSE
Fin