NL
68
NL
AUTOMATISCHE PROGRAMMERING (vereenvoudigd)
Procedure:
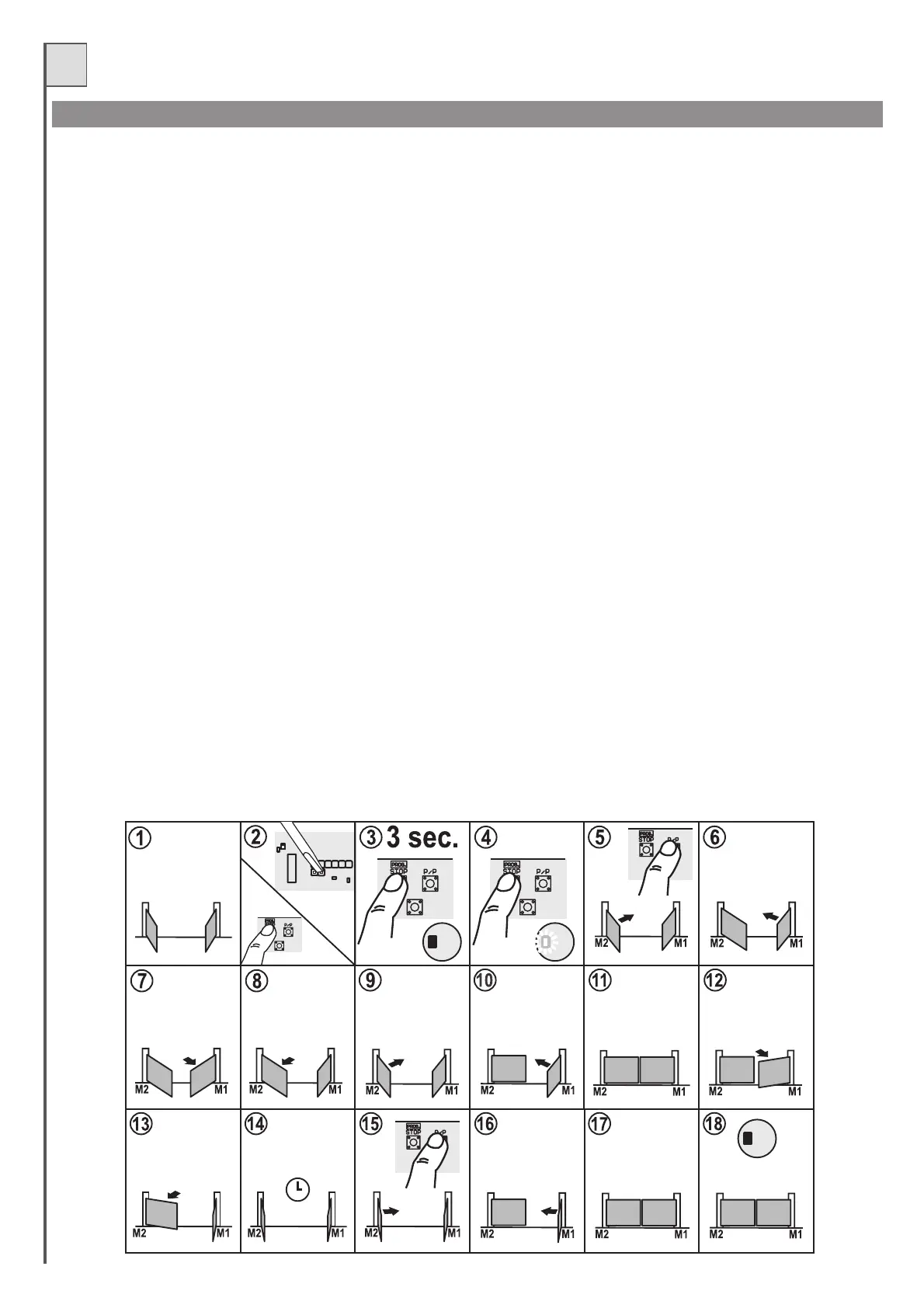
1- Zet de vleugels (of de enkele vleugel) in de stand poort bijna open: de vleugels moeten de ruimte hebben om ongeveer vijf seconden in sluitrichting te
bewegen.Als de vleugelsniet in positiestaan, kan dein de voorgaande paragraaf beschreven procedure wordengevolgd.
2- Houd de knop Prog ingedrukt en verricht een reset door metde schroevendraaier de jump Reset (onderdeel 20 van afb.1) te kortsluiten .
3- Houd de knop Prog. ingedrukt
4- Na drie seconden zal de led Ld3 (en het knipperlicht) gaanbranden. De programmeerprocedure is geactiveerd
5- Druk op de knop P/P om de herkenningsfase van start te laten gaan. De vleugel M2 beweegt zich gedurende (ongeveer) 3-5 sec in de sluitrichting en
stopt daarna.
6- Vleugel M1 voert onmiddellijk daarnadezelfde beweging uit.
7- De vleugel M1 beweegt zich gedurende (ongeveer) 3-5 sec in deopeningsrichting enstopt daarna.
8- Vleugel 2 voert onmiddellijk daarnadezelfde beweging uit.(3-5sec in de openingsrichting en stopt daarna).
9- De vleugel met M2 gaat helemaal dicht
10- Ook M1 gaat dicht
11-12- Wanneer beide vleugels dicht zijngaat M1 automatischopen.
13- Wanneer M1 open is, gaat ook M2 helemaalopen
14- Wanneer de twee vleugels beide in de openingsstandstaan, begint degeheugenopslag van depauzeduur.
15- Na afloop van de gewenste pauzeduur,drukt u opde knop P/P, waarna de motor M2 inde sluitrichting gaat.
16- Wanneer M2 bij de aanslag komt, sluit M1.
17- Poort helemaal gesloten.
18- Einde van het programmeren (de besturingseenheid stelt zichnu op een normale werking in).
BELANGRIJK:bij deze beweging mogen de vleugels niet tegen de aanslag komen; als dit gebeurt, dient u de herkenningsfase opnieuw uit te
voeren(waarbij u de vleugels zo zet dat zij erin slagen in 5 seconden te sluiten zondertegen de aanslag te komen).
BELANGRIJK: ook bij deze beweging mogen de vleugels niet tegen de aanslag komen; als dit gebeurt, dient u ze beter te zetten en de
herkenningsfase opnieuw uit te voeren. Nu heeft de besturingseenheid alle parameters van de twee vleugels gemeten (aanwezigheid-
afwezigheid encoder en de snelheid, stroom op de motoren).
- De besturingseenheid zoekt tijdens deze manoeuvre naar de aanwezigheid van de encoders op de motoren: HET IS NIET TOEGESTAAN
één motor met de encoder te hebben ende ander zonder; als dat gebeurt (bijvoorbeeld als gevolg van een defect op de encoder van één van
demotoren) zal de besturingseenheid een foutmelding geven die bestaat uit 10 knipperingen van hetledje LD3en het controlelampje.
-U kuntcontroleren ofde aanwezigheid van de encoders correct wordt gedetecteerd doorte kijkennaar deledlampjes voor werking van de motoren
(onderdelen9 en21vanafb.1),alshetledjevandebewegendemotor knippert,betekentditdatdedesbetreffendeencoderisgevonden.
Alshet ledje ononderbroken blijft branden, betekent dit dat de encoder niet is gevonden.
- Als de besturingseenheid op beide motoren geen encoder vindt, zal obstakeldetectie plaatsvinden door de stroom tijdens de werking
wordengecontroleerd.
-De in het geheugen opgeslagen waarden blijven bewaard totdat ze opnieuw worden geprogrammeerd.
- Deze vereenvoudigde programmeerprocedure zal automatisch de vertragingswaarden van de vleugel en de punten van snelheidsafname
instellendoor de defaultwaarden toe te passen.
- Indien deze instellingen ongeschikt mochten blijken te zijn voor de installering in kwestie, zal het noodzakelijk zijn de in de volgende
paragraafbeschreven gevorderde programmering uit te voeren.
P3
P3 P3
LD3 LD3
Reset
P3
P3
LD3
Tijd
Pauze
Eind