322
FUNCTION CHARACTERISTICS
all-F87.ai
i
Lxc(L)
i
s
i
Lxc(H)
i
sLx
i
dLx
I
sLx
I
dLx
i
Lx(H)
SIDE H
i
Lx(L)
SIDE L
Magnitude, polarity,
phase and ciclic sequence
and zero sequence currents
compensation
DFT
DFT
i
d
Stabilization and
differential current
measurement
NO TRIP
TRIP
Saturation detector
Harmonic restraint
0
100
200 300
Biased dual slope
percentage characteristic
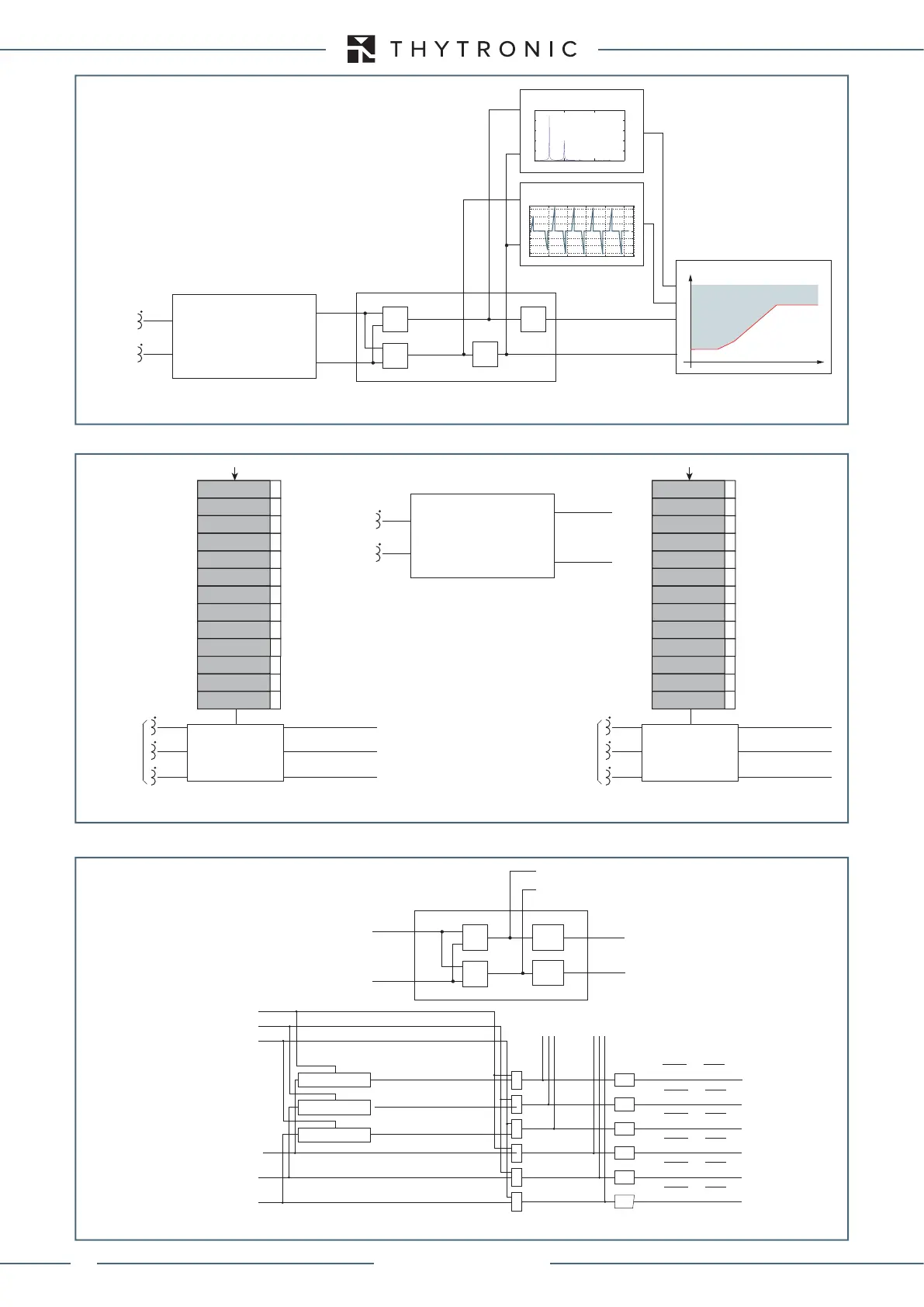
General logic diagram of the differential elements 87G-87M-87T
Magnitude, polarity, phase and ciclic sequence and zero sequence currents compensation
87T-compensation.ai
i
L3c(H)
i
L2c(H)
i
L1c(H)
i
L1(H)
i
L2(H)
i
L3(H)
M (H )*P(H )*C (H )
SIDE H
MatchType
Inct(H)
PhSeq
pL1(H)
pL2(H)
pL3(H)
ProtObj
NumSides
Sn(H)
Vn(H)
Gnd(H)
Conn(H)
VectGroup(H)
i
L3c(L)
i
L2c(L)
i
L1c(L)
i
L1(L)
i
L2(L)
i
L3(L)
M (H )*P(H )*C (H )
SIDE L
MatchType
Inct(L)
PhSeq
pL1(L)
pL2(L)
pL3(L)
ProtObj
NumSides
Sn(L)
Vn(L)
Gnd(L)
Conn(L)
VectGroup(L)
i
Lxc(L)
i
Lxc(H)
i
Lx(H)
SIDE H
i
Lx(L)
SIDE L
Magnitude, polarity,
phase and ciclic sequence
and zero sequence currents
compensation
Stabilization and differential current measurement
i
L3c(H)
i
L2c(H)
i
L1c(H)
i
L1(H)
i
L2(H)
i
L3(H)
M (H )*P(H )*C (H )
SIDE H
MatchType
Inct(H)
PhSeq
pL1(H)
pL2(H)
pL3(H)
ProtObj
NumSides
Sn(H)
Vn(H)
Gnd(H)
Conn(H)
VectGroup(H)
i
Lxc(L)
i
s
i
Lxc(H)
i
sLx
i
dLx
I
sLx
I
dLx
DFT1
DFT1
i
d
Stabilization and
differential current
measurement
DFT1
DFT1
DFT1
DFT1
DFT1
DFT1
+i
L1c(L)
se sign[i
L1c(L)
∙i
L1c(H)
]≥0,
-i
L1c(L)
se sign[i
L1c(L)
∙i
L1c(H)
]<0
+i
L2c(L)
se sign[i
L2c(L)
∙i
L2c(H)
]≥0,
-i
L2c(L)
se sign[i
L2c(L)
∙i
L2c(H)
]<0
+i
L3c(L)
se sign[i
L3c(L)
∙i
L3c(H)
]≥0,
-i
L3c(L)
se sign[i
L3c(L)
∙i
L3c(H)
]<0
sign[i
L1c(L)
∙i
L1c(H)
]
sign[i
L2c(L)
∙i
L2c(H)
]
sign[i
L3c(L)
∙i
L3c(H)
]
I
SL1
=[|I
L1
c(H)| + |I
L1
c(L)|]/2
I
dL1
=[|I
L1
c(H)| + |I
L1
c(L)|]/2
I
dL2
=[|I
L2
c(H)| + |I
L2
c(L)|]/2
I
dL3
=[|I
L3
c(H)| + |I
L3
c(L)|]/2
I
SL2
=[|I
L2
c(H)| + |I
L2
c(L)|]/2
I
SL3
=[|I
L3
c(H)| + |I
L3
c(L)|]/2
+
+
+
+
i
SL1
i
SL2
i
SL3
i
dL1
i
dL2
i
dL3
+
+
+
+
+
+
+
+
i
L3c(H)
i
L2c(H)
i
L1c(H)
i
L3c(L)
i
L2c(L)
i
L1c(L)
i
dL1...L3
i
dL1...L3
I
SL1...L3
I
SL1...L3
XMR-D EQUIPMENT MANUAL
Ed. 2.9 - 02/2021
 Loading...
Loading...
