385
4-5. Using the driving support systems
CAMRY_GE
4
Driving
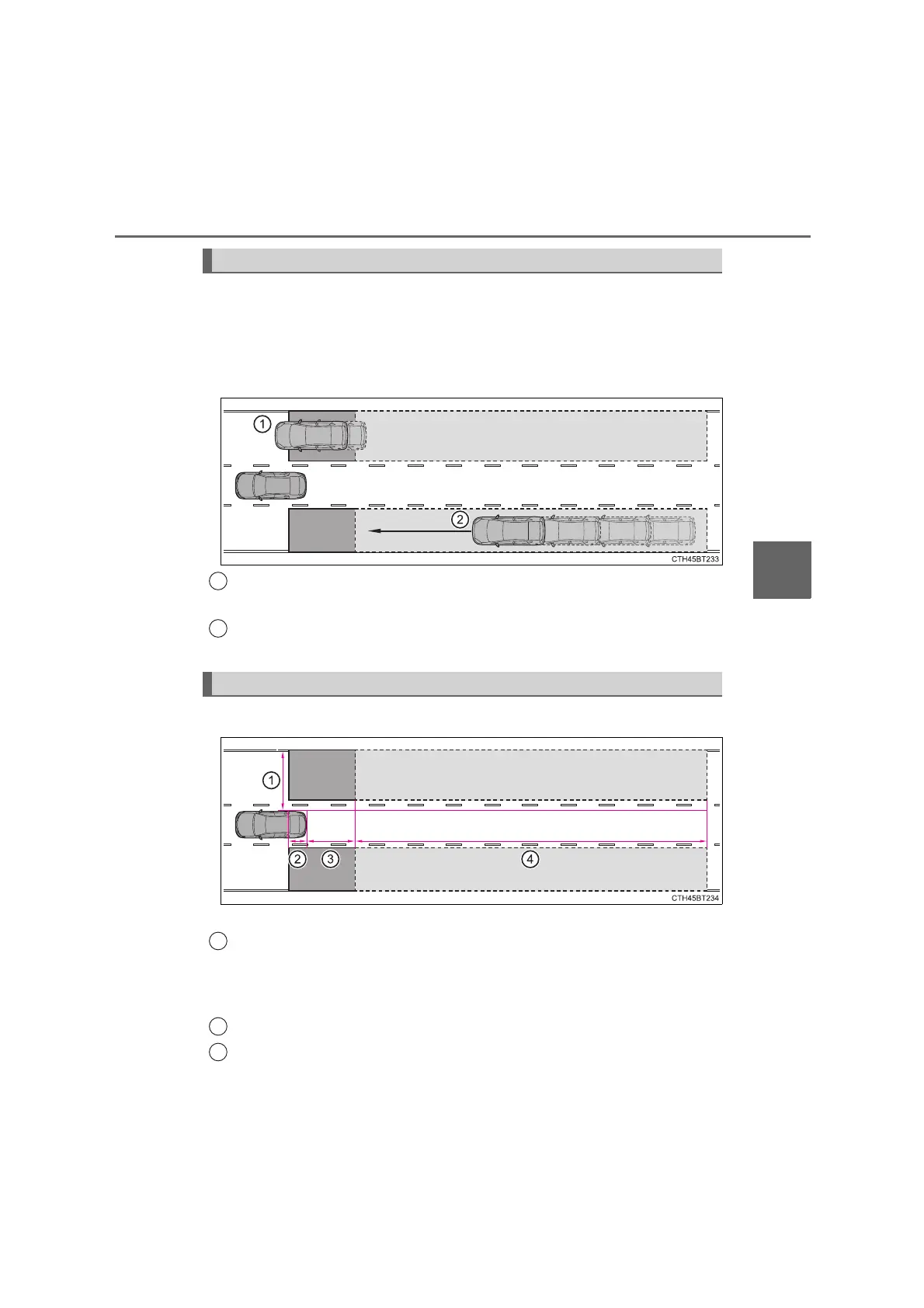
The BSM function uses radar sensors to detect the following vehicles
traveling in an adjacent lane in the area that is usually not reflected in
the outside rear view mirror (the blind spot), and advises the driver of
the presence of such vehicles via the indicators on the outside rear
view mirrors.
Vehicles that are traveling in areas that are not visible using the out-
side rear view mirrors (the blind spots)
Vehicles that are approaching rapidly from behind in areas that are
not visible using the outside rear view mirrors (the blind spots)
The areas that vehicles can be detected in are outlined below.
The range of the detection area extends to:
Approximately 0.5 m (1.6 ft.) to 3.5 m (11.5 ft.) from either side of
the vehicle
The area between the side of the vehicle and 0.5 m (1.6 ft.) from the side
of the vehicle cannot be detected
Approximately 1 m (3.3 ft.) forward of the rear bumper
Approximately 3 m (9.8 ft.) from the rear bumper
BSM function
BSM function detection areas
1
2
1
2
3
CAMRY_OM_General_OM33F01E

 Loading...
Loading...










