-7-
Gyroscope calibration
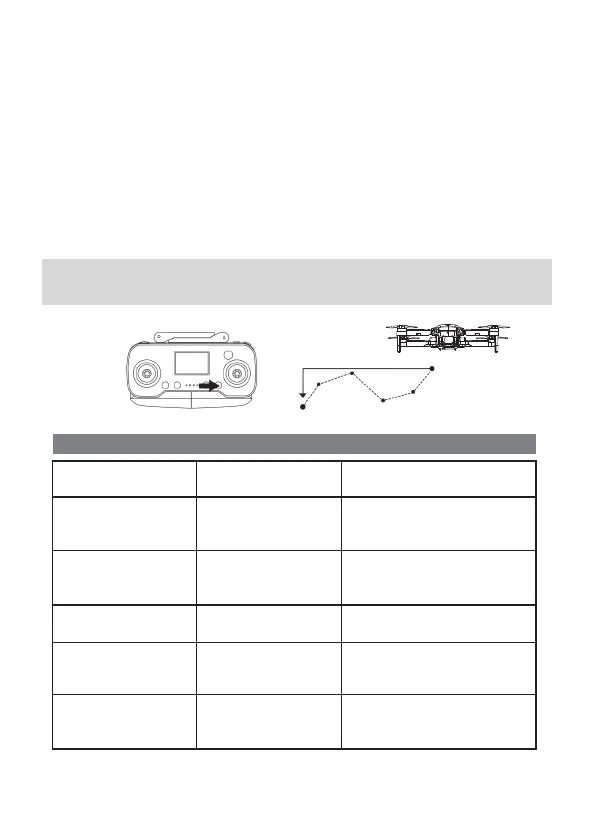
3.One key return/signal break return/low voltage return
One-press for return End point
Starting point
One key return: We can press the one key return key (Figure 5) to start the UAV return in case of good
GPS signal (over 10 satellites). UVA will return to the take-off position in straight line and
land after startup. The remote controller will give a Di Di sound when UAV returns until
UAV lands or cancels flying for return. Its return process is consistent with break signal
return out of control. But the difference is that player can avoid the obstacles through the
rocking bar when the UAV returns and lands and the player can re-acquire the control right
after press the return key for return.
Break signal return: The flight control system will take over the control right of the UAV and control the
UAV for flight and stop at a place with signal when GPS signal is good (over 10 GPS
satellites), remote signal and APP signal are cut off for over 6 seconds after UAV
successfully records return points(star is connected to GPS before taking off) before
taking off.
Low voltage return: The indicator will flicker slowly in low voltage. At the same time, the remote controller
gives a prompt that the UAV automatically returns to 20m around the take-off point
(The UAV height and distance will be restricted to within 20m if it returns to the take-off
point in low voltage.)
FIG. 3
Resolution guide for common problems
Problems Causes Resolutions
Drone indicator is flashing
while not respond when
operating
1. Unsuccessful Drone
GPS souxing
2. Low power of Drone
1. Move the Drone to an empty place
to perform souxing again
2. Charging the battery
1. Low battery
2. Blade deformation
1. Charging the battery
2. Replacement of blade
Blade deformation Replacement of blade
1. Blade deformation
2. Poor motor
1. Replacement of blade
2. Replacement of motor
Triaxial acceleration sensor
overbalances due to impact
Make the Drone standstill for 5-10
seconds
Drone blades turn but
can't fly
The drone was badly shaken
Can't keep the drone steady
after fine-tuning to the bottom
After impact, uncontrolled
flying of Drone when start
again
Note: UAV will return to the take-off place in straight line but cannot avoid the obstacles (UAV will rise to
20 m in height and then return if the flight height is too low) in automatic return process. The UAV will be
forced to return in low voltage return status but cannot return when GPS signal is poor or GPS fails to work.

 Loading...
Loading...