Rockwell Automation Publication 2094-UM001J-EN-P - March 2017 247
Configure the Load Observer Feature Appendix D
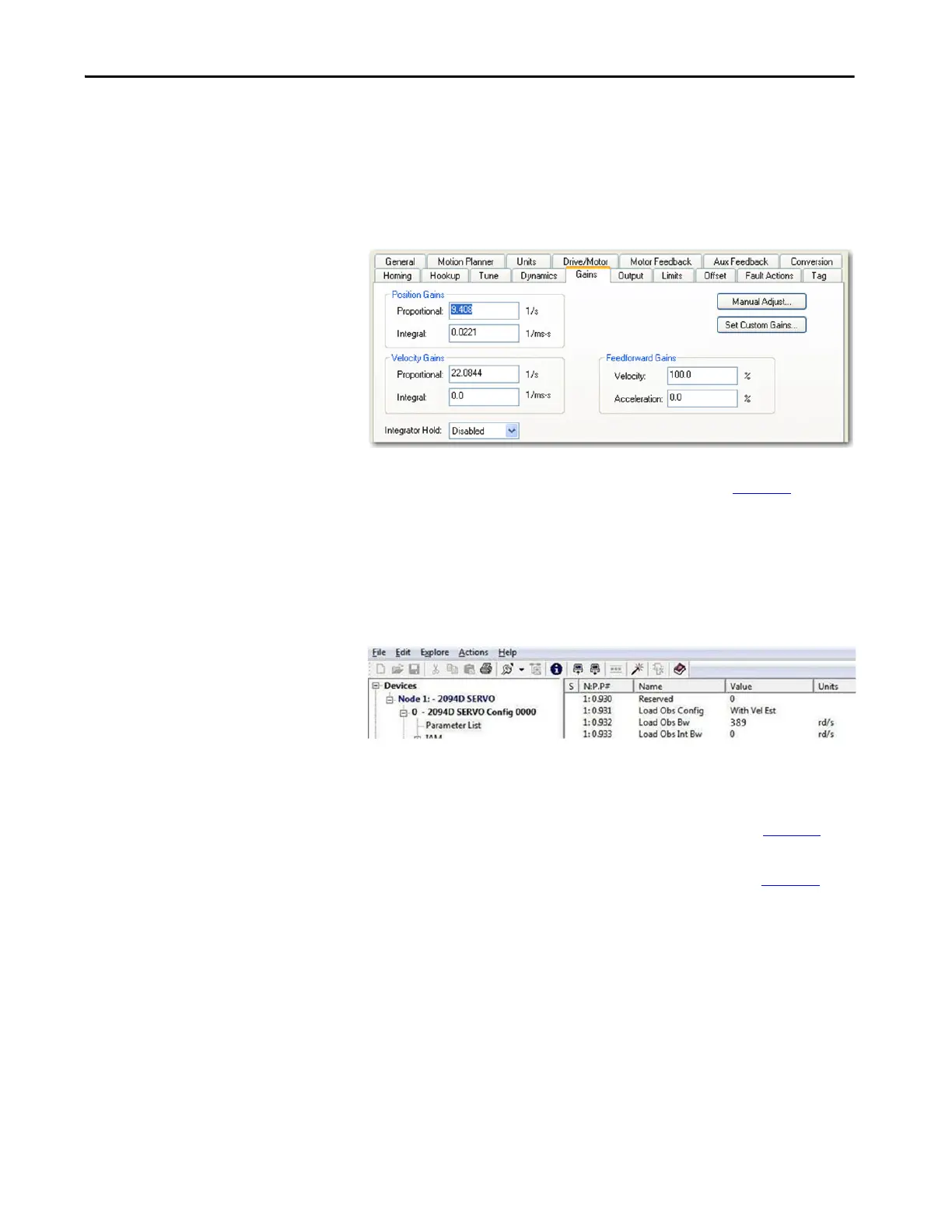
2. Configure these settings and values on the Gains tab.
a. Set the Position Proportional Gain = Kpp
b. Position Integral gain = Kpi
c. Velocity Proportional Gain = Kvp
d. Velocity Integral Gain = Kvi
To manually increase the gains by some factor to optimize the response,
refer to Manual Tuning for Further Optimization on page 248
.
3. Configure these IDN parameter values.
a. IDN P-431 = 2 (Load Observer with Velocity Estimate)
b. IDN P-432 = Kop
c. IDN P-433 = 0
d. IDN P-065 = 1
4. If the Low-pass Output Filter is enabled, verify that the Low-pass
Output Filter Bandwidth ≥ Velocity Proportional Gain x 5/(2pi).
Sercos IDN P-065 has an impact on how the Low-pass Output Filter
functions. Refer to Torque Low-pass Filter Bandwidth on page 241
for
more information.
5. Refer to Compensate for High Frequency Resonances on page 251
, to
tune-out resonant frequencies.
 Loading...
Loading...


