Lesson1 Assembling the Car
Mecanum Omni direction wheel is a very interesting wheel which allows robot car make
omni-directional movement( parallel shift to left and right).
In this project, we will show how to use Arduino to control an Osoyoo Brand Mecanum wheel
robot car to make some basic movement including go forward, backward, left turn, right
turn, parallel left shift, parallel right shift etc.
This lesson also shows you how to install the chassis of this car and connect Arduino
control signal wires to two model-X (L298N) driver board. This installation will be the
start point of our other lessons.
OSOYOO Mecanum wheels robotic car chassis x1(2xleft-wheels/2xright-wheels and Motor x 4)
OSOYOO Mega2560 board fully compatible with Arduino UNO/Mega2560 x 1
OSOYOO V1.0 Wifi shield x 1
OSOYOO Model X motor driver x 2
OSOYOO battery box x 1
Model X to Model X connection white cable (2 pin XH.25 female to female) x 1
18650 batteries(3.7V) x 2 (the kit don’t include the batteries,click it to buy it
separately)
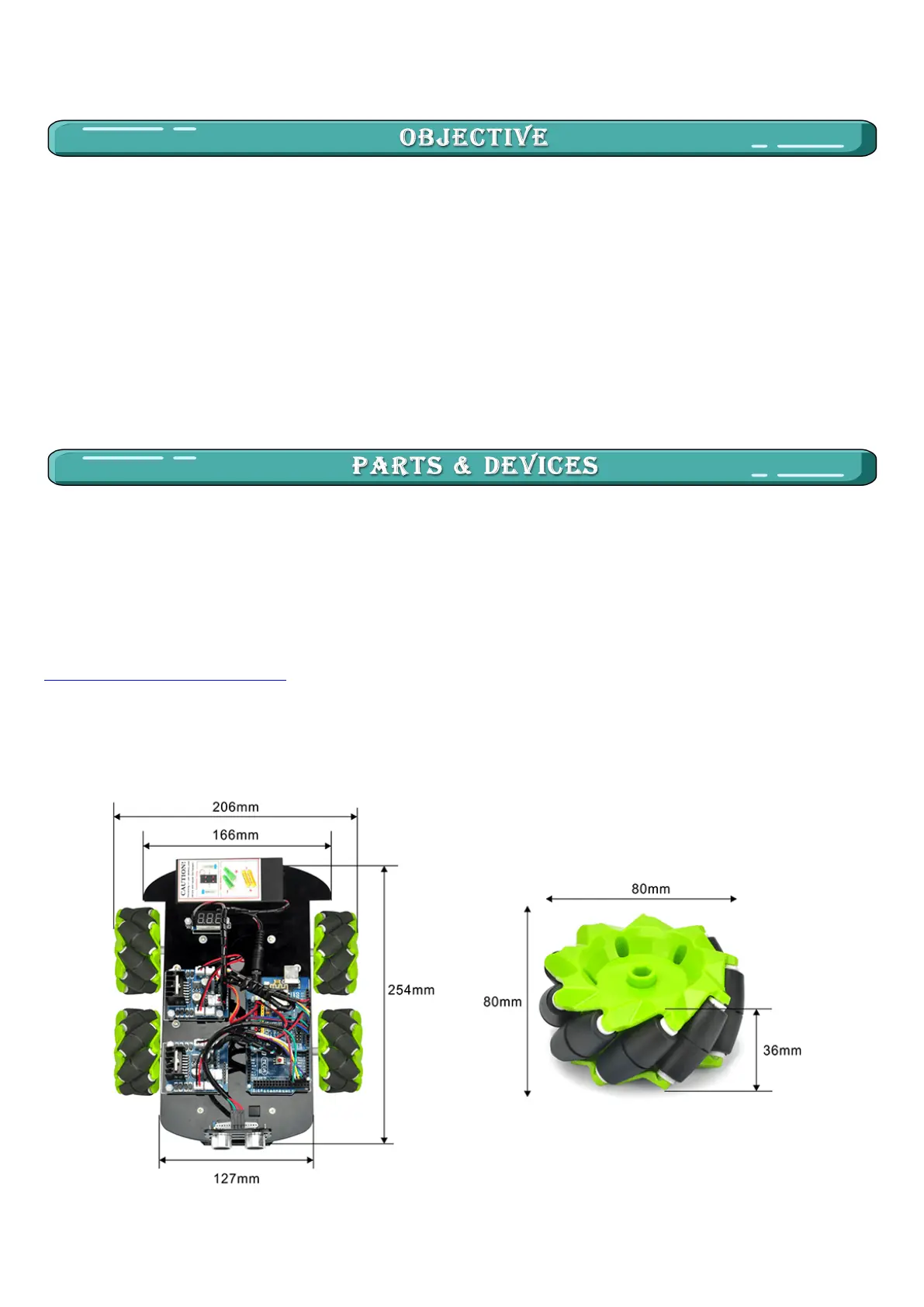
Picture 1: size dimensions:

 Loading...
Loading...