Do you have a question about the Artec Robo 2.0 and is the answer not in the manual?
Includes Temperature, Light, and 9-Axis sensors for environmental and motion data.
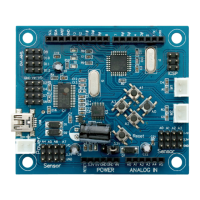
Features Power/Connection lights, A/B buttons, and a Buzzer for user feedback and interaction.
Includes Edge connector, USB port, Reset, and Power connectors for expansion and operation.
Cover for edge connector with studs for connecting Artec Blocks.
Connect Battery Box or USB cable to turn on the device.
Enter program selection mode by holding A and pressing reset.
Select and run programs using A and B buttons.
Disconnect Battery Box or USB cable to turn off the device.
Understand stud placement and pull blocks straight apart to connect/disconnect.
Step-by-step guide on using the Block Remover tool for separating blocks.
Details on Power Switch, Power Connector, and DC Motor Terminals (M1/M2).
Explains Digital Output, Analog Input, and I2C Communication terminals.
Guidance on polarized ports, non-reversible plugs, and cable compatibility.
Compatibility of LEDs (white, blue, green, red) and Buzzers with expansion unit terminals.
Connecting Servomotors to digital output terminals, including default angles and rotation.
Connecting DC Motors to terminals, speed control, and external power requirements.
Connecting Touch Sensors to analog input terminals for ON/OFF detection.
Connecting Sound Sensors to analog input terminals for audio detection.
Connecting Light Sensors to analog input terminals for measuring light intensity.
Connecting Accelerometers to I2C terminal for slope and movement data.
Connecting IR Photoreflectors to analog input terminals and how they work.
Details on 3-wire and 4-wire sensor connecting cables and their uses.
The ArTec Robo 2.0 is a programmable robot designed for educational and creative use, featuring a Core Unit that serves as the central processing component. This device allows users to build and program robots using a variety of sensors, actuators, and structural blocks.
The Core Unit is the brain of the robot, running all programs and managing interactions with connected components. It features a 5x5 full-color LED matrix for visual feedback, displaying various images and information in RGB colors. For user input, it includes two A/B buttons, which are detected when pressed, allowing for interactive control and program selection.
Environmental sensing capabilities are integrated directly into the Core Unit. A temperature sensor measures external temperature, though users should be aware that the internal temperature of the Core Unit itself can affect readings, especially during extended use with significant electrical power, such as when the LED matrix is active. A light sensor, utilizing a photo transistor, converts ambient light into electricity to measure surrounding light intensity. For auditory feedback, a buzzer transforms electrical signals into sound.
Motion and orientation are detected by a 9-axis sensor, which includes a 3-axis accelerometer to quantify motion and tilt, a 3-axis gyroscope to measure angular velocity and rotational motions, and a 3-axis compass to determine the device's facing direction by measuring Earth's magnetic field.
For connectivity and expansion, the Core Unit is equipped with an edge connector for external expansion devices, a microB USB port for transferring programs from a computer and supplying power, and a power connector for plugging in a Battery Box. A reset button is also present to restart the device. Wireless communication is supported, indicated by a blue connection light that illuminates during Bluetooth/Wi-Fi activity. An Artec Block connecting cover with studs allows for direct attachment of Artec Blocks.
To start the Core Unit, users can connect either a Battery Box or a USB cable. The device automatically switches on, and a green power light illuminates. For program selection, users hold down the A button and press the reset button. After the power light briefly turns off and then back on (approximately 3 seconds after releasing the reset button), releasing the A button will put the device into Program Select Mode, indicated by a '0' displayed in green LEDs. In this mode, pressing the A button cycles through program numbers (0-9), and pressing the B button runs the selected program.
The device comes pre-loaded with sample programs for testing. These include:
Downloading new programs from the software overwrites existing sample programs in the selected slot. To turn off the device, users simply disconnect the Battery Box and/or USB cable. The next standard start-up will run the last selected program.
Artec Blocks are structural components with a special shape that requires attention to stud position during building. They are designed to be pulled straight apart for disassembly; forcing them to bend may cause damage. For difficult separations, a Block Remover tool can be used: insert the upper part of the remover into the gap between blocks, slide it, and pull. The claws of the remover can also pinch the base of a block to create a gap, followed by pulling the block out.
The Robot Expansion Unit expands the Core Unit's capabilities by adding more motors and sensors. The Core Unit can be connected to the expansion unit in either direction.
The expansion unit includes a power switch to turn the Core Unit's power ON/OFF by holding it for approximately 2 seconds. A power connector (marked BATT) is available for plugging in a Battery Box, and it is crucial for supplying power when using Servomotors or DC Motors with the expansion unit.
The unit provides several types of terminals:
All ports on the expansion unit are polarized, using nonreversible plugs. Users must ensure the plug faces the correct way when connecting. Original Artec Robo parts can be connected, but their connecting cables for sensors and Servomotors do not have nonreversible plugs. When connecting, users should align the wire colors with the matching marks above the port. Note that Artec Robo's 4-wire sensor connecting cable (for Accelerometers) is not compatible with this unit.
Instructions for using the software are available on the Artec Robo 2.0 software download page at https://www.artec-kk.co.jp/artecrobo2/.
| Category | Educational Robotics Kit |
|---|---|
| Programming Language | Scratch |
| Connectivity | USB |
| Sensors | Light sensor, Touch sensor |
| Actuators | DC Motors |
| Components | sensors, motors, wheels |
| Power Source | 6 x AA Batteries |