Fieldbus system
BC9000 and BC910054 Version: 4.0.0
RT-Ethernet** Time [ms]
RAW < 1ms + K-bus (depending on the K-bus propagation delay)
Modbus Time [ms]
TCP 12 to 15 ms (default)
Fast TCP* 1 to 3 ms
* as from firmware B5, Table 100 Register 29 - "1" Fast TCP / "0" TCP (see Modbus interface) [}65]** from
firmware B8
7.4 ADS-Communication
7.4.1 ADS-Communication
The ADS protocol (ADS: Automation Device Specification) is a transport layer within the TwinCAT system. It
was developed for data exchange between the different software modules, for instance the communication
between the NC and the PLC. This protocol enables communication with other tools from any point within
the TwinCAT. If communication with other PCs or devices is required, the ADS protocol can use TCP/IP as a
basis. Within a networked system it is thus possible to reach all data from any point.
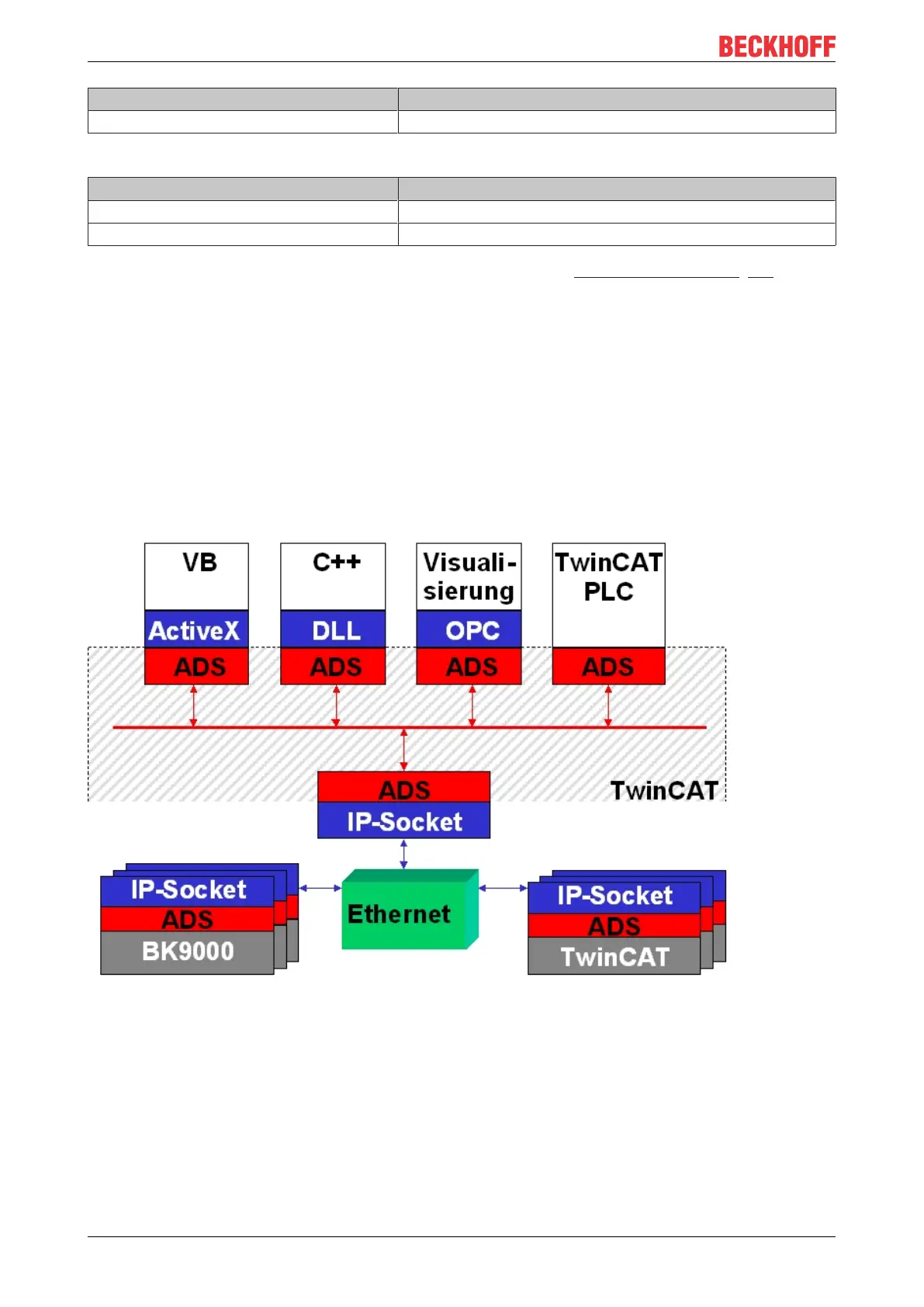
Fig.40: The ADS protocol as a transport layer within the TwinCAT system
The ADS protocol runs on top of the TCP/IP or UDP/IP protocols. It allows the user within the Beckhoff
system to use almost any connecting route to communicate with all the connected devices and to
parameterize them. Outside the Beckhoff system a variety of methods are available to exchange data with
other software tools.