Technical description
6 Technical description
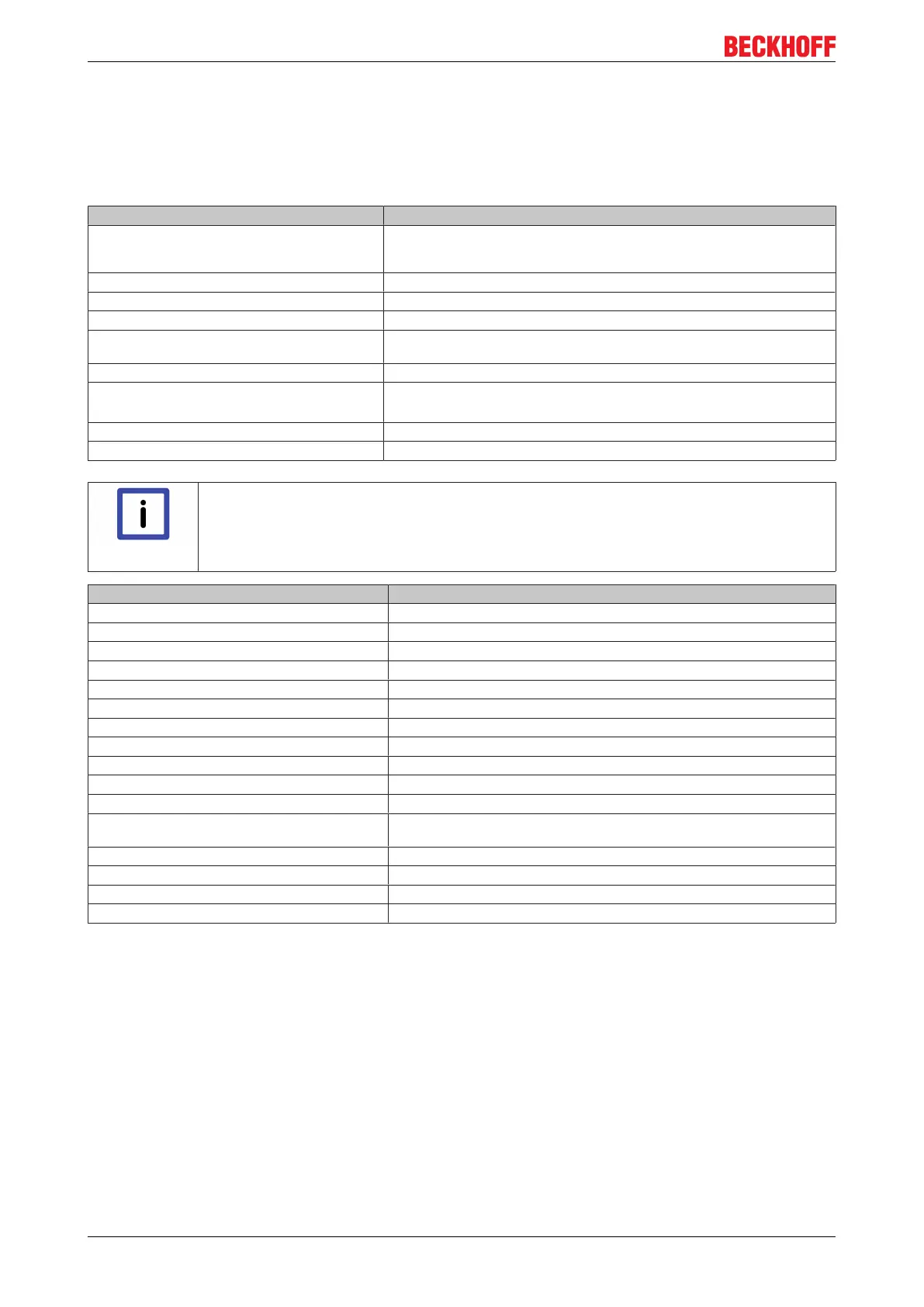
6.1 General technical data
Environmental influences XTS
Ambient temperature -10 °C – +40 °C
If ambient temperatures exceeding +40 °C are expected, it is essential to contact
the Beckhoff applications department.
Transport and storage temperature -25 °C - +85 °C
Permissible relative humidity 15 % - +95 %, no condensation
Contamination level EN 60204 / EN 50178 Level 2
Corrosion protection Normally not required. Under extreme operating conditions, special measures
may be imposed by the production.
Installation altitude Between 1000 m and 2500 m, the performance reduces by 1.5% per 100 m.
Installation position Vertical installation position of the starter kit and housing
Other installation positions are possible for further individual XTS components
Ventilation XTS via convection
Protection class IP65
Note
Ventilation of the machine bed!
To improve system utilization, it is strongly recommend to actively or passively cool the ma-
chine bed of the XTS. For further information on cooling please contact the Beckhoff appli-
cations department!
System properties XTS
Max. force 100 N at standstill
Payload 80 N at 2 m/s
Continuous force 30 N (at approx. 30 °C temperature increase between motor / mounting frame)
Velocity 4 m/s at 48 V
DC
supply
Acceleration > 100 m/s² (without payload)
Synchronization accuracy < ± 0.15
1*)
mm at 1.5 m/s within a straight module
Absolute accuracy < ± 0.25
2*)
mm within a straight module
Repeatability (unidirectional) < ± 10 µm (standstill)
Mover length 50 mm in direction of movement (AT9011)
Mover weight Approx. 350 g (complete mover without attachments)
Maximum system length > 10 m (dependent on computing power, no system limit)
Occurring temperature during operation /
storage temperature
0…< +105 °C
3*)
/ -25 °C…+85 °C
Protection class IP 65
Approvals CE
Vibration/shock resistance Conforms to EN60068-2-6/EN 60068-2-27
EMC immunity/emission Conforms to EN61000-6-2/EN 61000-6-4
1*)
The synchronization accuracy is primarily dependent on the mechanical stiffness and the load on the
mover. The controller setting and the mechanical offset between the modules must also be taken into
account.
2*)
Typically achievable absolute accuracy; this may be exceeded in case of significant thermal warming of
the module (∆ϑ ≥ 30°C) or lack of parallelism or orthogonality of the encoder flag to the motor module.
3*)
Please note the special safety instructions for the XTS on page 8 of this manual!
eXtended Transport System Start-Up18
Version: 1.2