Clearpath Robotics Inc. ©2011 All Rights Reserved.
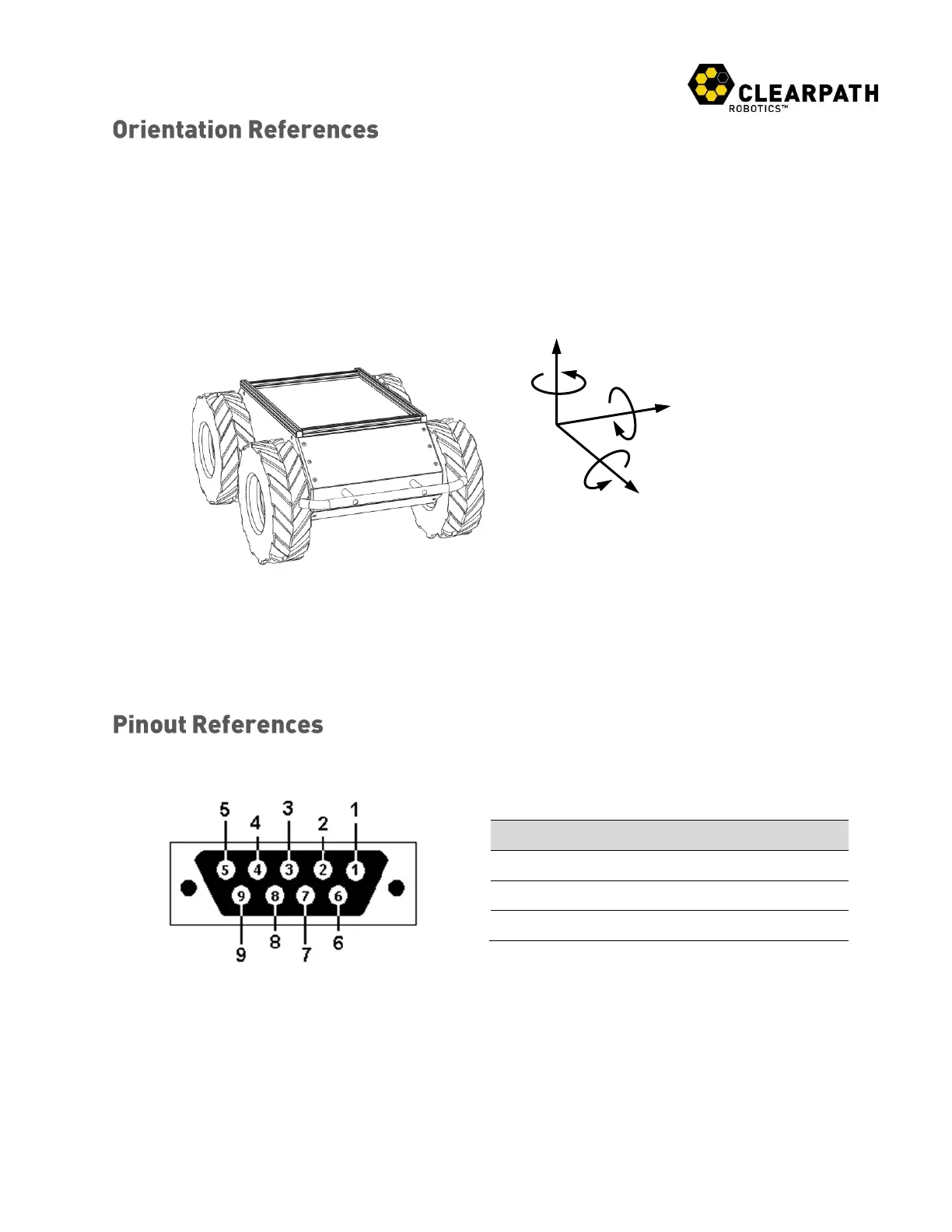
The reference frame used by all Clearpath Robotics ground vehicles is based on ISO 8855, and is shown
in Figure 2. Husky is being viewed from the front; when commanded with a positive translational
velocity (forward), wheels travel in the positive x-direction.
The direction of the axes differs from those used for roll, pitch, and yaw in aircraft, and care should be
taken to ensure that data is interpreted correctly.
Husky A200 provides a female DE-9 connector, for communication with a host device. The pinout of this
connector is shown in Figure 3.
Figure 2: Husky A200 Reference Frame
Figure 3: Husky A200 DE9 Pinout